XiaoMi-AI文件搜索系统
World File Search System车道
自动化车道变更行为的行为预测和基于SLAM技术的环境感知
除了环境感知传感器(例如摄像机,雷达等)。在自动驾驶系统中,人们可以感知车辆的外部环境,实际上,也有一个感知传感器在系统中默默地专用,即定位模块。本文探讨了自动驾驶汽车的自动巷改变行为预测和环境感知的猛烈(同时定位和映射)技术的应用。它讨论了传统定位方法的局限性,引入了大满贯技术,并将激光雷达的大满贯与视觉大满贯进行了比较。来自特斯拉,Waymo和Mobileye等公司的现实世界实例展示了AI驱动技术,传感器融合和在自动驾驶系统中的集成。随后,纸张研究了SLAM算法,传感器技术的细节,以及自动车道变化在驾驶安全性和效率方面的重要性。它突出显示了特斯拉对其自动驾驶系统的最新更新,该系统结合了使用SLAM技术的自动车道更改功能。本文结论是强调SLAM在实现自动驾驶汽车的准确环境感知,定位和决策中的关键作用,最终增强了安全性和驾驶经验。
住持Leigh,Ham Green,Pill,Easton-In-Gordano农村车道行动计划
大型住房和就业发展必须寻求最大程度地减少其对附近乡村车道的影响,以帮助维持其特殊特征,并通过步行/驾驶和骑自行车来促进新居民的休闲和公用事业旅行。在分配住房和就业地点时,本地计划还必须阐明这些分配的影响以及所需的缓解以克服影响。这些缓解必须在伴随当地计划的基础设施交付计划中列出。预计将在周围的本地车道网络上进行Wolvershill,Yanley和Nailsea/Backwell缓解。

使用机器检测自动驾驶汽车的车道和快速断路器警告系统
IT系Matoshri工程与研究中心,印度纳西克。 摘要 - 随着自动驾驶技术的快速发展,确保这些车辆在道路上的安全已成为最重要的问题。 安全自主驾驶的关键方面之一是准确检测到车道和潜在的道路危害,例如断路器。 在这项研究中,我们提出了一个车道和速度断路器警告系统(LSBW),该系统采用机器学习算法来增强自动驾驶汽车的感知能力。LSBWS利用计算机视觉和机器学习技术的组合来实时检测和分析和分析路线和速度障碍。 该系统利用摄像头传感器捕获前方的道路场景,然后采用图像处理算法来识别车道标记和速度断路器。 使用卷积神经网络(CNN)在捕获的图像中准确检测和分类这些特征。 关键字:车道检测,快速破坏者检测,自动驾驶汽车,机器学习算法,卷积神经网络,道路安全。IT系Matoshri工程与研究中心,印度纳西克。摘要 - 随着自动驾驶技术的快速发展,确保这些车辆在道路上的安全已成为最重要的问题。安全自主驾驶的关键方面之一是准确检测到车道和潜在的道路危害,例如断路器。在这项研究中,我们提出了一个车道和速度断路器警告系统(LSBW),该系统采用机器学习算法来增强自动驾驶汽车的感知能力。LSBWS利用计算机视觉和机器学习技术的组合来实时检测和分析和分析路线和速度障碍。该系统利用摄像头传感器捕获前方的道路场景,然后采用图像处理算法来识别车道标记和速度断路器。使用卷积神经网络(CNN)在捕获的图像中准确检测和分类这些特征。关键字:车道检测,快速破坏者检测,自动驾驶汽车,机器学习算法,卷积神经网络,道路安全。
住持Leigh,Ham Green,Pill,Easton-In-Gordano 农村车道行动计划
涵盖了大多数利伍兹林地(包括英格兰的一些林业和国家信托拥有土地),但不包括,NPA沿着雅芳峡谷沿线的牵引车包括abbots leigh村和各种各样的林地和农田,沿Leigh Court和Leigh Court到Ham Green,Ham Green,Pill&Easton-Gordano,Gorn-Gordano,以及M5-Gordano和M5 Comm of M5的Motored of Gordano Motore。超出了M5,但仍在Pill&Easton-In-In-In-Gordano教区内,由Bristol Port Company拥有和经营的Royal Portbury Dock。在开发活动方面,码头从指定监管中受益。2因此,该计划不能也不能解决与码头有关的战略或操作问题。尽管如此,码头区为土地和海洋保护做出了重要贡献。此外,它提供
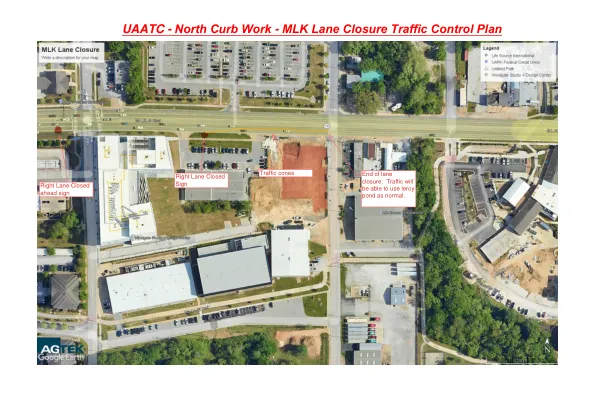
北部路缘工作 - MLK车道关闭交通管制计划
关闭MLK Jr的南东行车道。 BLVD卸下并更换现有的路缘和排水沟。North Eastbound Lane将保持开放。关闭时间为24小时/天,从3/3/25到3/10/25。

联网和自动驾驶汽车中基于人工智能的车道变换模块的设计:一项调查
摘要 变道是一项复杂的驾驶任务,因为它要求车辆了解高度动态的周围环境,做出决策并及时执行。通过利用传感器和车辆间通信,网联和自动驾驶汽车 (CAV) 有可能显著提高变道的安全性和效率。任务的复杂性和实时性要求使得变道成为特别适合人工智能 (AI) 方法的问题。在本文中,我们调查了基于 AI 的 CAV 变道 (LC) 模块的设计。首先,我们确定可能影响 LC 模块设计的关键因素。接下来,我们调查了基于 AI 的变道的最新发展。最后,我们从关键影响因素的维度分析这些方法,并总结尚未解决的挑战和可以指导基于 AI 的 LC 模块未来发展的机遇。

多代理强化学习用于混合交通中连接和自动驾驶汽车的合作车道
自主驾驶在过去二十年中引起了重大的研究兴趣,因为它提供了许多潜在的好处,包括释放驾驶员疲惫的驾驶和减轻交通拥堵等。尽管有前途的进展,但改变车道仍然是自动驾驶汽车(AV)的巨大挑战,尤其是在混合和动态的交通情况下。最近,在AVS中改变车道的决策,并表现出了令人鼓舞的结果,对增强学习(RL)进行了广泛的探索。然而,大多数研究都集中在单车设置上,并且在多个与人类驱动的车辆并存的背景下改变车道的情况已经受到了很少的关注。在本文中,我们在混合交通高速公路环境中制定了多个AV的改变道路的决策,作为一种多代理增强学习(MARL)问题,每个AV都会根据邻近的AVS和HDVS的动作做出改变车道的决策。具体来说,提出了一种新型的本地奖励设计和一个人共享方案,提出了多代理优势 - 批评者(MA2C)方法。尤其是多目标奖励功能

华盛顿街西行新自行车道入口令自行车骑行者担忧
在虚拟信息发布会上了解有关灭鼠的知识。城市检查服务部和 SomerViva 移民事务办公室邀请社区成员于 1 月 9 日星期四下午 5 点至 6 点通过 Zoom 在线参加关于灭鼠的虚拟研讨会。与会者将了解如何识别您的财产中是否有老鼠、灭鼠方法、预防技巧以及可以提供帮助的城市资源。将提供西班牙语翻译。立即访问 somervillema.gov/rodentsaway 了解更多信息并参加或获取技巧。 **************************** 无法参加城市中期仪式和演讲的社区成员可以通过 CityTV 的 YouTube 频道在线观看,网址为 youtube.com/SomervilleCityTV **************************** 本周祝几位当地人生日快乐:祝 Ka- tie McDaid 生日快乐。我们祝她生日快乐。祝退休高中教师 Marion Joyce 生日快乐。我们希望她能享受这一天。祝伟大的摄影师 Ken Kotch 生日快乐。我们希望他能度过愉快的一天。祝 Phil Forsyth 生日快乐,我们祝他一切顺利。祝伟大的人 Matt Hoey 生日快乐。我们祝他和家人度过愉快的一天。祝 Donna Desrescente 生日快乐。我们祝她一切顺利。我们祝我们所有的 Facebook 朋友,如 Linda M. Alves、Rose Amabile、Chris Walsh、Alberta Healey、Janice Burpee、Paul Nunziato 和 Suzanne Ryan Marks 生日快乐。我们希望每个人都有美好的一天。继续第 7 页