XiaoMi-AI文件搜索系统
World File Search System软件控制

适用于高性能应用的微型执行器
最初,一级方程式赛车允许使用复杂的软件控制 PAS 系统,具有多重冗余以确保安全。然而,2002 年,国际汽联的一项削减成本的举措禁止在动力转向中使用任何电子控制装置。车队首先研究了基于电动机的解决方案,但后来又恢复了“功率密度更高”的液压技术。在这项规则改变之后,车队尝试了各种液压机械方法,但这些方法比理想的要大,而且安装起来也很有挑战性。

适用于立方体卫星的 CogniSAT-XE1 AI 加速器和视觉处理板
CogniSAT-XE1 TM 板的数据传输和命令控制通过 USB 或以太网接口进行。该板充当机载计算机 (OBC) 上客户端应用程序的服务器。在 OBC 上运行,板操作完全由 Ubotica™ 软件控制。OBC 通过所选接口将固件(启动映像)和 NN blob 和/或 DPE 配置传输到板。初始传输后,图像可以通过接口传输到板,操作结果通过同一接口传回。板的电源循环需要重新传输固件。
面向嵌入式工程师的 MPLAB XC8 PIC 汇编器用户指南
// 配置字 1 CONFIG FEXTOSC=XT // 晶体振荡器 CONFIG RSTOSC=EXTOSC // EXTOSC 按照 FEXTOSC 位操作 CONFIG CLKOUTEN=OFF // CLKOUT 功能已禁用 CONFIG PR1WAY=ON // PRLOCK 位只能被清除和设置一次 CONFIG CSWEN=ON // 允许写入 NOSC 和 NDIV CONFIG FCMEN=ON // 故障安全时钟监视器已启用 // 配置字 2 CONFIG MCLRE=EXTMCLR // 如果 LVP=0,则 MCLR 引脚为 MCLR;如果 LVP=1,则 RE3 引脚功能为 MCLR CONFIG PWRTS=PWRT_OFF // PWRT 被禁用 CONFIG MVECEN=OFF // 向量表不用于确定中断优先级 CONFIG IVT1WAY=ON // IVTLOCK 位只能被清除和设置一次 CONFIG LPBOREN=OFF // ULPBOR 被禁用 CONFIG BOREN=SBORDIS // 欠压复位被启用,SBOREN 位被忽略 CONFIG BORV=VBOR_2P45 // 欠压复位电压 (VBOR) 设置为 2.45V CONFIG ZCD=OFF // ZCD 被禁用,通过设置 ZCDCON 的 ZCDSEN 位置位来启用 CONFIG PPS1WAY=ON // PPSLOCK 只能被清除/设置一次;清除/设置周期后 PPS 锁定 CONFIG STVREN=ON // 堆栈满/下溢将导致复位 CONFIG DEBUG=OFF // 后台调试器禁用 CONFIG XINST=OFF // 扩展指令集和索引寻址模式禁用 // 配置字 3 CONFIG WDTCPS=WDTCPS_31 // 分频器比率 1:65536 ; WDTPS 的软件控制 CONFIG WDTE=OFF // WDT 禁用; SWDTEN 被忽略 CONFIG WDTCWS=WDTCWS_7 // 窗口打开 100%;软件控制;不需要密钥访问 CONFIG WDTCCS=SC // 软件控制 // 配置字 4 CONFIG BBSIZE=BBSIZE_512 // 引导块大小为 512 个字 CONFIG BBEN=OFF // 引导块已禁用 CONFIG SAFEN=OFF // SAF 已禁用 CONFIG WRTAPP=OFF // 应用程序块不受写保护 CONFIG WRTB=OFF // 配置寄存器(300000-30000Bh)不受写保护 CONFIG WRTC=OFF // 引导块(000000-0007FFh)不受写保护 CONFIG WRTD=OFF // 数据 EEPROM 不受写保护 CONFIG WRTSAF=OFF // SAF 不受写保护 CONFIG LVP=ON // 低压编程已启用,MCLR 引脚,MCLRE 被忽略 // 配置字 5 CONFIG CP=OFF // PFM 和数据 EEPROM 代码保护已禁用

4000plusbondtester
•Hot Bump/Pin Pull - 一种新的负载弹药筒使该地面断裂测试更好,尤其是用于评估PCB基板材料和低调的焊料颠簸。•铜线和螺柱,凸起和支柱的第一键球拉力 - 首次在这些重要的互连上实现拉伸测试。•疲劳拉力和剪切 - 疲劳分析正在成为评估焊料关节可靠性的越来越重要的方法。软件控制和硬件的混合物可以在拉力和剪切模式下进行疲劳测试。•钝化层剪切 - 软件和特殊负载工具的组合提供了用于球剪切的解决方案,而在被钝化层限制访问的情况下。

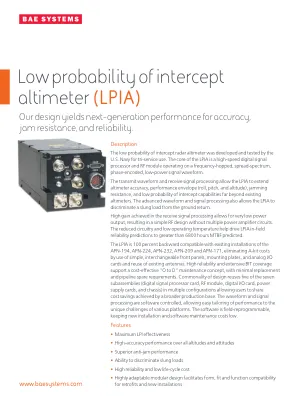
低截获概率高度计 (LPIA) - BAE 系统
LPIA 100% 向后兼容现有的 APN-194、APN-224、APN-232、APN-209 和 APN-171 安装,通过使用简单、可互换的前面板、安装板和模拟 I/O 卡以及重复使用现有天线,消除了 A 套件成本。高可靠性和广泛的 BIT 覆盖范围支持经济高效的“O 到 D”维护概念,将更换和管道备件要求降至最低。设计的通用性在多种配置中重复使用了七个子组件中的五个(数字信号处理器卡、RF 模块、数字 I/O 卡、电源卡和机箱),使用户可以共享更广泛生产基地实现的成本节约。波形和信号处理由软件控制,允许轻松定制性能以应对各种平台的独特挑战。该软件可现场重新编程,从而保持新安装和软件维护成本低廉。

ax-v-manual_eng.pdf
AXV 驱动器完全由软件控制;不需要或不可能进行任何硬件调整。控制软件(用于个性化设备)以及所有应用和调整参数都存储在设备非易失性存储器中,可以通过将驱动器与 PC 连接来访问和编辑。这种启动连接通常通过 RS 485 串行端口 1 执行。特定于应用程序的应用程序数据和调整参数集是应用程序数据库。要创建、检查、编辑和复制此数据库,AXV Cockpit 配置工具随平台一起提供。此工具安装在用于执行 AX-V 驱动器安装的 PC 中。AXV Cockpit 在安装期间充当驱动器的控制中心;它访问所有驱动器功能和参数,识别设备及其使用寿命,并允许复制到 1 和从 1 复制。AX-V 平台配备多点、行业标准 RS 485 串行链路。如果仅提供 RS 232 连接,则需要 RS 232 - RS 485 转换器。
四路数字飞行控制系统评估
四重 DFCS 架构 RDFCS 设施设置 保证方法的互补性 多级测试基础 数字飞行系统生命周期架构 设计任务 增强型电传操纵控制律 基线系统架构 通道逻辑 转换图 同步谓词/转换网络 谓词/转换网络细节 谓词/转换网络 模拟输出 顶层软件控制图 DFCS 可靠性框图 飞机模拟框图 托盘化 DFCS 控制律框图 免费 RSS 飞机时间历史软件控制流程图 增强型 RSS 飞机时间历史多级测试 收尾自动测试方案 正常通道同步时间历史启动通道同步时间历史稳定性无俯仰速率增强响应稳定性无攻角增强响应

ATA 30 防冰防雨 - SmartCockpit
冰探测器由一个振动传感元件(探头)组成,该元件与暴露在气流中的支撑支柱结合在一起。支柱的主要目的是将探头延伸到气流中足够远的地方,以允许液滴撞击传感探头。当冰在传感元件上积聚时,通过传感元件谐振频率的变化可以检测到冰的积聚。电子设备主要由带有嵌入式软件、信号调节和电源硬件的微控制器组成。微控制器计算传感器频率,控制加热器功能,调节输出信号,并执行各种内置测试 (BIT) 功能。内部软件控制两个离散输出信号,这些信号以适合显示遇到的任何结冰情况或机组人员手动激活飞机防冰系统故障的方式与飞机航空电子设备接口。