XiaoMi-AI文件搜索系统
World File Search System软材料

e xo s k e l e n s便携式充气柔软可穿戴机器人,以帮助工业工作期间的肩膀
在工厂工作期间的重复架空任务可能会导致肩部受伤,从而导致健康和生产力损失受损。柔软的可穿戴上肢机器人有可能使用软材料和主动控制的有效预防伤害工具。我们介绍了便携式充气肩部可穿戴机器人的设计和评估,用于在肩伸出的任务中协助工业工人。机器人像一件衬衫一样穿着,带有集成的纺织气动执行器,惯性测量单元和便携式致动单元。它最多可提供6.6台牛顿仪的扭矩,以支撑肩膀,并以每分钟六次打开和循环援助。在模拟工业任务期间的人类参与者评估中,机器人降低了激动剂肌肉活动(前,中和后三角肌和二头肌腕骨)高达40%,而关节角度在当前样本大小中的关节角度略有变化,而关节角度却不小于7%,而范围范围不到7%。对控制器参数的组件进一步强调,更高的辅助幅度和较早的辅助时机导致统计上显着的肌肉活性减少。在任务之间具有动态过渡的任务电路期间,基于运动学的机器人控制器对误导表现出稳健性(96%的真实负率和91%的真实正率),表明在不需要援助时对用户的最小干扰。对压力调制概况的初步评估还强调了用户感知和硬件限制之间的权衡。最后,五名汽车工厂工人在飞行员制造区域中使用了机器人并提供了反馈。

制造方法和机械自适应微流体内部设备的慢性体内验证
摘要:心脏内神经探针既是大脑功能基本神经科学研究的强大工具,也是旨在恢复瘫痪患者功能的大脑计算机界面(BCIS)的关键组成部分。心脏内神经探针既可用于在单个单位分辨率下检测神经活动,又可以刺激具有高分辨率的少量神经元种群。不幸的是,由于神经素的流动反应在植入和持续存在于皮质中的神经蛋白敏捷反应,因此在慢性时点上倾向于在慢性时点上失败。正在开发许多有前途的方法来规避炎症反应,包括开发较少的弹药材料/装置设计以及抗氧化剂或抗渗透性疗法的递送。在这里,我们报告了我们最近的努力,以整合动态软化的聚合物底物的神经保护作用,旨在通过在探针中掺入微型流通通道,以最大程度地减少皮质内神经探针/组织界面处的组织菌株和局部药物递送。相对于所得的设备机械性能,稳定性和微流体功能,制造过程和设备设计均已优化。优化的设备能够成功地在六周的体内大鼠研究中提供抗氧化溶液。组织学数据表明,多进输出设计最有效地减少了炎症的标记。通过药物输送和软材料作为平台技术的组合方法来减少炎症的能力,可以将来的研究探索添加性疗法,以进一步增强心脏内神经探针的性能和临床应用的寿命。

便携式充气柔软可穿戴机器人在工业工作期间有助于肩膀
在工厂工作期间的重复架空任务可能会导致肩部受伤,从而导致健康和生产力损失受损。柔软的可穿戴上肢机器人有可能使用软材料和主动控制的有效预防伤害工具。我们介绍了便携式充气肩部可穿戴机器人的设计和评估,用于在肩伸出的任务中协助工业工人。机器人像一件衬衫一样穿着,带有集成的纺织气动执行器,惯性测量单元和便携式致动单元。它最多可提供6.6台牛顿仪的扭矩,以支撑肩膀,并以每分钟六次打开和循环援助。在模拟工业任务期间的人类参与者评估中,机器人降低了激动剂肌肉活动(前,中和后三角肌和二头肌腕骨)高达40%,而关节角度在当前样本大小中的关节角度略有变化,而关节角度却不小于7%,而范围范围不到7%。对控制器参数的组件进一步强调,更高的辅助幅度和较早的辅助时机导致统计上显着的肌肉活性减少。在任务之间具有动态过渡的任务电路期间,基于运动学的机器人控制器对误导表现出稳健性(96%的真实负率和91%的真实正率),表明在不需要援助时对用户的最小干扰。对压力调制概况的初步评估还强调了用户感知和硬件限制之间的权衡。最后,五名汽车工厂工人在飞行员制造区域中使用了机器人并提供了反馈。
材料科学与冶金工程更新...
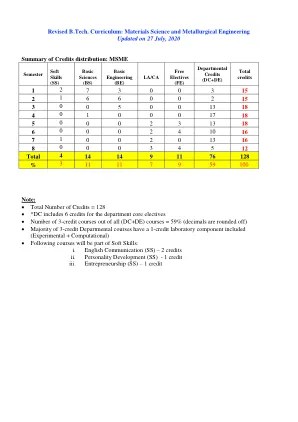
课程类型 SEM-I 15 PHxxxx 物理 2 BS CYxxxx 化学 2 BS MA1110 数学(微积分-I)1 BS MA1220 数学(微积分-II)1 BS LAxxxx 英语交流 2 SS ID1063 编程入门 3 BE MS1210 材料科学与工程简介 2 DC MS1211 材料修补实验室 1 DC EP1118 物理数学 1 BS SEM-II 15 PHxxxx 物理实验室 2 BS CY1031 化学实验室 2 BS ID1054 数字制造 2 BE MS1220 材料结构 2 DC MS1230 固体物理学 – I 3 BE MAxxxx 数学 – II(线性代数 + 微分方程)2 BS IDxxxx AI/ML 简介 1 BE SSxxxx SS 1 SS SEM-III 18 MS2210 材料科学中的 X 射线衍射 3 DC ID1041 工程制图 2 BE MS2220 物理冶金学基础 3 DC MS2230 固体物理学 - II 3 DC MS2240 材料热力学 3 DC MS2310 材料力学 3 BE MS2211 金相实验室 1 DC SEM-IV 18 MS2250 材料科学中的成像 3 DC MS2260 材料合成 3 DC MS2270 材料的机械行为 3 DC MS2280 材料加工中的传输现象 2 DC MS2290 固体中的扩散 3 DC MS2300 材料科学中的计算方法 3 DC BTxxxx 生命科学概论 1 BS SEM-V 18 MS3310 相变 3 DC MS3320 软材料 3 DC MS3330萃取冶金学基础 2 DC MS3311 功能材料处理实验室 2 DC MS3321 机械行为实验室 1 DC xxxxx 自由选修课 3 FE MS3340 材料科学中的光谱技术 2 DC LA/CA LA/CA 2 LA/CA SEM-VI 16 XXXX 自由选修课 4 FE 选项 1:MS3315:实习(仅适用于 CGPA >= 8) 选项 2. MS3035 部门项目(向所有人开放) 选项 3:部门选修课(向所有人开放)

关于创建超富且高度透明的电子
近年来,与压力相关的疾病估计会影响日本超过400万人,并且可穿戴的传感器技术可量化日常生活中的压力。为了实现不可察觉的传感器,该研究领域已经开发了薄膜,可拉伸的透明导体,可以通过使用生物保护导体材料无线测量与医疗材料的低噪声潜在信号(约0.1 UV)。关键材料之一,一种生物干电电极,由弹性体和导电聚合物组成,该聚合物在材料中形成纳米至微米大小的相位分离结构。此外,通过使用由Ag/Au核心壳纳米线组成的inor-Ganic(金属)材料,它们是肉眼看不见的,作为接线材料,我们已经构建了高度导电和透明的可拉伸接线。由生物干燥电极和可拉伸的接线层组成的透明传感器板,它可以表达高电导率的高电导率,这使其成为与医疗材料相当的低噪声潜在测量的重要探针(图1)。我们还开发了一种新技术,用于上述金属和有机纳米材料的低损伤多层模式,并开发了“薄膜,柔性和透明的电化学晶体管”(图2)。另一方面,我们仅使用一个简单的传感器纸进行了现场测量水溶液浓度(图3)。通过重点关注从液体溶剂本身及其局部吸收的宽带红外辐射,从而实现了无样和无标记的液体质量测量。这种液体质量测量使用我们的研究小组新开发的高度敏感,宽带和可拉伸的薄膜光学传感器表。可以将薄板连接到诸如植物,氯化乙烯基管,蛇形管和橡胶管等软材料上,并且可以稳定遵循由液体流量引起的液体流量的膨胀,收缩,弯曲,弯曲,弯曲和其他变形。这项研究的结果证明了一种有助于无处不在的质量测试的基本技术,预计将来会为基础设施和农业的安全网的建设做出贡献。
无线驱动的热和磁反应软式双向材料,具有可编程形状的形状
无线驱动和远程控制的活跃软材料已引起了大量的研究注意,因为与传统的智能材料相比,它们在各种各样的领域中具有潜在的潜在应用,其性能有所改善。[1-5]这些合成伴侣对环境刺激的反应并表现出模仿或与自然界观察到的行为或现象相匹配的能力。[6-8]在这些智能材料中,机械刺激响应材料从环境输入中收获能量,例如光线,[9-11]热量,[12,13]溶剂,[14,15]和物理领域和[16-18],并将其转换为机械能量,无需通过机械形状,无需通过板上的功率来源。这些无线材料可以完成各种功能,例如运动[19-21]以及物体操纵和运输[22-24]作为执行器和传感器。在迄今为止报道的大量活跃智能材料中,由于它们的独特特征和独特的优点,液晶弹性体(LCE)和磁反应弹性体(MRE)最近与其他人脱颖而出。lces表现出大量的菌株(高达400%)和高度工作,以响应多种环境刺激,例如温度[25-27]光,[11,28]和电场。[17,18,29] LCES内部元素的预定对齐(由导演n描述)启用了已在软执行器和生物启发的设备中使用的复杂的3D可逆形状。这些局部菌株共同起作用,以实现指定的形状 - 修复行为,这通常是平面外弯曲的。[6,11,30]外部刺激会根据LCES的当地董事场诱导收缩和拉伸菌株的对齐中的订单参数。另一方面,MRE由柔软的弹性体(SE)矩阵组成,其嵌入式硬磁性微或纳米果(MMPS或MNP)组成。外部磁场在嵌入的MMP或MNP上产生局部力和扭矩。分离的扭矩会导致身体变形和MRE材料的净旋转,而颗粒所经历的力会融合到净力,从而置换MRE或变形。[31]磁性致动具有远距离,健壮和快速致动的优势,并且瞬间的能力

热固化热固性弹性体的嵌入式 3D 打印以及流变学和机器路径的相互依赖性
聚醚醚酮 (PEEK) 可直接打印成高性能部件。[1–5] 然而,仍有大量材料难以适应 3D 打印。例如,热固化的热固性材料(如环氧树脂和有机硅)因其机械性能、耐化学性和热稳定性的结合而广泛应用于许多应用中。[6] 然而,这些聚合物通常是双部分系统,必须混合,然后需要几分钟到几小时才能交联并完全固化。这些热固性材料会长时间保持液态,因此很难进行高保真度的 3D 打印,因为它们会流动并且不会保持其预期的几何形状。基于挤出的直接油墨书写 (DIW) 已经成功打印了环氧树脂和有机硅等热固性材料,但通常需要修改油墨成分和流变性以使其具有触变性,或使已经具有触变性,以允许在空气中打印。 [7,8] 此外,DIW 面临着与相关熔融沉积成型 (FDM) 类型方法相同的几何约束,例如悬垂结构和独立结构如果不使用支撑材料则难以打印。这些对可用于 3D 打印的材料和几何形状的限制严重限制了使用慢固化液体预聚物和软材料制造部件的复杂性。自由形式可逆嵌入 (FRE) 3D 打印是一种最近开发的技术,用于打印软质和液体材料并克服了这些挑战。[9] FRE 和相关的嵌入式 3D 打印技术首次由 Feinberg 和 Angelini 团队于 2015 年在不同的论文中描述,涉及将预聚物挤压到具有屈服应力的微凝胶基支撑浴中。 [10,11] 与将细丝挤出到平台上的典型 FDM 方法不同,在 FRE 中,所选材料(通常称为墨水)直接挤出到支撑槽中并固定到位,直到固化。支撑槽还大大减少了重力的影响,并且通常不需要任何额外的打印支撑结构。尽管有这些优势,但 FRE 工艺仍然存在独特的挑战

通过硼酸交联的聚(乙烯基醇)凝胶,用于宇航员的辐射保护
凝胶是由通过物理或化学键在水中交联的亲水聚合物组成的软材料。由于其轻巧且水丰富的性质,这些材料在包括空间环境在内的各个领域都有应用,以进行辐射保护。实际上,由于其高氢含量,凝胶表现出明显的辐射停止功率,从而减少了入射颗粒的碎片化。这表明他们在屏蔽电子设备和保护宇航员的健康方面的潜在效用。在这项工作中,制造了基于聚(乙烯基醇)(PVA)和硼酸(BA)的交联凝胶,并使用不同的实验和建模技术进行了投资。评估用于制造PVA/BA凝胶的参数的效果,例如时间和温度。傅立叶变换红外光谱(FTIR)用于评估BA与PVA大分子形成杂交互构键的能力。了解这些凝胶的热机械特性和粘弹性,在压缩模式下进行了动态机械分析(DMA)。使用确定性传输代码考虑银河宇宙射线,太阳颗粒事件,太阳粒子事件和低地球轨道辐射,在不同的空间辐射环境中评估了屏蔽性能。使用高电荷(Z)和能量传输(HZETRN)代码来创建不同的横截面作为所选材料的首次输出,然后将电离辐射传播和运输材料内的电离辐射。结果突出显示了在室温下制造的PVA/BA凝胶的几个优点,而无需进行热处理处理。首先,与没有交叉链接器的凝胶相比,BA的掺入可以使水含量略有增加。此外,对弹性模量的检查改善了机械性能,其机械性能显示出PVA凝胶的弹性模量的两倍。此外,对剂量法的分析表明,这些凝胶的辐射保护有效性与纯水的辐射保护有效性,而热处理的PVA/BA凝胶表现出降低的水含量,从而降低了屏蔽性能和降低的柔韧性。因此,在室温下实现的PVA/BA凝胶似乎是PVA凝胶与热处理的对应物之间的最佳材料,使其非常适合将其集成到宇航员的个人保护设备中。
Bich(2024)生物组织剑桥元素。 ...
有机体是由易于降解的软材料制成的复杂系统,但是它们通过恒定的组件营业额来维护自己。首先,与其他自然系统或人工制品相比,它们似乎非常脆弱。工件可以具有非常抗性的部分,可以长期保持不变。有机体会受到其组件的持续降解和转化,需要连续更换或修复。它们是由高度动态的蛋白质等组件制成的,其寿命很短,并且会不断变化。蛋白质会自发降解,或者由于周围环境的特性(例如温度,pH值和与其他分子的相互作用)的变化,它们可能会失去功能形状(变性)。此外,当它们不再执行活动或不需要这种活动时,它们可能会被生物体降解,并且可以将其部分回收以构建新蛋白质。另一个重要区别是,虽然岩石甚至大多数伪像这样的实体可以持续很长一段时间而不会进行任何活动,但生命有机体无法关闭自己的过程 - 除了细菌孢子等极端情况外,甚至只有部分情况,但在某些情况下,相反,他们需要从能量和需要的群体中恢复过来,以确保自己的养分和物质相互作用,并且要及时又有必要的群体,或者要搬迁,或者要逐渐融合。 环境。虽然伪影(一旦被损坏,保持不变),但生命有机体可以修复或更换其零件。尽管其组成部分的脆弱性以及需要连续行动(或者,凭借这些特性更好),但地球上的个别生物和生命更广泛地表现出显着的韧性。他们可以关闭一些更苛刻的活动,并动员他们的资源来应对压力,并且可以从严重的损害中恢复过来。重要的是,尽管在一套固定的条件下使工件工作 - 尽管在最近的趋势中,目的是设计更多灵活的伪影,但在不同条件下,有机体可以以不同的方式起作用。由于这些能力,植物可以在被有毒废物污染的区域生存,或者细菌可以抵抗抗生素,并且几乎可以生活在从平流层到地壳深度的所有环境中,在包括极端温度,pH,压力等的各种情况下。与植物,真菌和单细胞生物一起,动物的生命甚至能够幸存于小行星影响的后果。有机体,单独或分组,表现出极大的灵活性,使他们能够应对环境中不断变化的条件

氢键增强的胺-丙烯酸酯液晶单晶弹性体
单畴(永久取向的“单晶”)液晶驱动通常是获得人造软材料类似肌肉驱动的关键方案。[1–3] 然而,由于聚合物弹性体的各向同性,这种物理上偏置的分子结构的需求给经典的合成聚合物弹性体带来了技术挑战。1991 年,Finkelmann 等人 [8] 引入了一种两阶段氢化硅烷化方法,并报道了第一个成功的具有独立驱动功能的“向列液晶单晶弹性体”。在这种方法中,其本质一直是随后二十年制造单畴液晶驱动的首选方案,对轻度交联的凝胶施加单轴机械延伸,以建立内部单轴取向场,然后进行进一步(第二阶段)固化以永久固定该取向。然而,这种方法在实践中非常困难,因为半固化凝胶本身具有机械脆弱性,需要充分拉伸才能实现取向。这降低了液晶元件在不断扩展的变形和驱动应用中的可用性。为了实现更复杂的液晶取向模式并规避分阶段固化问题,人们开发了其他基于外部场的技术,特别是表面取向 [9–12] 和动态键交换。[13–20] 基板的多样化像素定义表面使驱动模式的扩展成为可能,而不仅仅是简单的收缩-伸展。尽管进行了功能化,但材料的规模仍然受到特定基板的限制,并且表面穿透液晶元件本体的深度有限,使得该方法在技术上不足以进行大规模制造。因此,对于通用且灵活的液晶元件制造,机械拉伸仍然是生产多功能功能形式的单畴液晶元件的最简单策略。例如,鉴于聚合物纤维加工方法的成熟,这在编织纤维中尤为突出。人们希望有除氢化硅烷化之外的新化学方法,以便进行稳健的反应和方便的机械排列方式。近年来,二丙烯酸酯反应性液晶原(如 RM257 和 RM82)的商业化供应已成为 LCE 领域的强大推动力,考虑到涉及二丙烯酸酯的一系列良性反应,它提供了一种令人满意的替代方案。特别是,