XiaoMi-AI文件搜索系统
World File Search System输入的

基于机器学习的分类,以解开对 TMS 和听觉输入的脑电图反应
摘要:经颅磁刺激 (TMS) 和脑电图 (EEG) 的结合为研究皮质生理学提供了一个无与伦比的机会,通过描述大脑对外部扰动的电反应,即经颅诱发电位 (TEP)。虽然这些反映了皮质突触后电位,但它们可能会受到听觉诱发电位 (AEP) 的污染,这是由于 TMS 咔嗒声造成的,部分地显示出相似的空间和时间头皮分布。因此,TEP 和 AEP 可能难以通过常见的统计方法区分开来,尤其是在 AEP 抑制效果不佳的情况下。在这项工作中,我们探索了机器学习算法在健康受试者样本中区分用 TMS 咔嗒声、AEP 和非屏蔽 TEP 记录的 TEP 的能力。总体而言,我们的分类器在单个受试者级别提供了可靠的结果,即使对于以前的工作中没有显示差异的信号也是如此。当使用不同的受试者进行训练和测试阶段,并且比较三种刺激条件而不是两种刺激条件时,群体层面的分类准确度 (CA) 较低。最后,当使用平均 TEP 而不是单次试验 TEP 时,CA 较高。总之,这项概念验证研究提出机器学习是一种有前途的工具,可以将纯 TEP 与受感官输入污染的 TEP 区分开来。

具有替代输入的簇状态量子电路的有效经典模拟
我们提供了与团簇状态量子计算相关的纯纠缠系统的新例子,这些系统可以用经典方法高效模拟。在团簇状态量子计算中,输入量子位在布洛赫球的“赤道”处初始化,应用 CZ 门,最后使用 Z 测量或 cos(θ)X+sin(θ)Y 算子测量自适应地测量量子位。我们考虑修改初始化步骤时会发生什么,并表明对于有限度 D 的格,存在一个常数 λ ≈ 2.06,使得如果每个单独的量子位都处于在计算基础中对角线状态的迹距离 λ − D 内的状态,则该系统可以在从输出分布中采样的意义上在所需的总变差距离内进行经典模拟。例如,在 D = 4 的方格中,λ − D ≈ 0.056。我们开发了一个粗粒度版本的论证,它增加了经典有效区域的大小。在量子比特的方格中,经典可模拟区域的大小至少增加到约 ≈ 0.070,实际上可能增加到约 ≈ 0.1。结果推广到更广泛的系统,包括相互作用在计算基础上对角的量子系统,测量要么在计算基础上,要么对计算基础无偏。只想要简短的潜在读者

CommunityBots:创建和评估公共输入的多代理聊天机器人平台
近年来,支持AI支持的对话代理商或聊天机器人的普及已成为传统在线调查的替代方案,以吸引人们的信息。但是,使用单人聊天机器人在各种主题上进行相反并收集多方面的信息存在差距。先前的工作表明,单人聊天机器人难以理解用户意图并在多面对话中解释人类语言。在这项工作中,我们研究了如何利用多代理聊天机器人系统在多个领域进行多方面的对话。为此,我们进行了一项OZ的巫师研究,以调查多代理聊天机器人的设计,以在多个高级领域及其相关主题中收集公众投入。接下来,我们设计,开发和评估了CommunityBots,这是一个多代理聊天机器人平台,每个聊天机器人单独处理另一个域。为了管理跨多个主题和聊天机器人的对话,我们提出了一种新颖的对话和主题管理(CTM)机制,该机制根据用户的响应和意图来处理主题转换和聊天机器人转换。我们进行了一项主题研究,将社区机器人与单人聊天机器人基线与96名群众工作人员进行了比较。我们评估的结果表明,社区机器人参与者的参与度更高,提供了更高的质量响应,并且在同一会话中与多个不同的聊天机器人进行交谈时,会议中断的中断更少。我们还发现,与接口集成的视觉提示有助于参与者更好地了解CTM机制的功能,从而使他们能够感知文本对话的变化,从而提高用户满意度。基于我们研究的经验见解,我们讨论了多代理聊天机器人设计的未来研究途径及其在丰富信息启发中的应用。

全球土壤轮廓中碳输入的快速过境,无论进入深度
抽象的气候和土地管理变化正在改变土壤的碳输入。这种输入变化对长期土壤有机碳(SOC)平衡的结果取决于碳输入的过境行为。使用观察性碳输入和全球土壤剖面中的放射性碳数据,我们揭示,无论进入深度,新进入碳休假土壤中的新进入碳休假土壤中近25%,而30年后的剩余分数仅为13%。尽管如此,大多数SOC在所有土壤深处都年龄超过30岁。一起,这些结果表明,碳输入向老年SOC的转移效率低,这是长期SOC固存的有意义的碳成分。此外,我们揭示了SOC老化和碳输入过渡是两个不同的过程,应同时进行,但要分开机械性,以预测和管理SOC动态,以响应气候和土地管理变化下的碳输入变化。

重复输入相同的短语是否可以很好地评估专家文本输入的性能?
要确定像 OPTI 这样的新颖/不熟悉的键盘布局是否能胜过 QWERTY,通常需要通过纵向研究进行长时间的训练。为了减少这种后勤瓶颈,文献中一种流行的方法要求参与者重复输入相同的短语。然而,这种方法是否能很好地估计专家的表现仍不得而知。为了验证这种方法,我们进行了一项研究,让参与者在 OPTI 和 QWERTY 上输入相同的短语 96 次。结果表明,与使用不同短语的传统方法相比,这种方法有可能更快地估计出专家对新颖/不熟悉的键盘的表现。然而,我们还发现准确的估计仍然需要几天的训练,因此,并不能消除纵向研究的需要。因此,我们的研究结果表明,需要研究更快、更简单、更可靠的实证方法来评估文本输入系统。
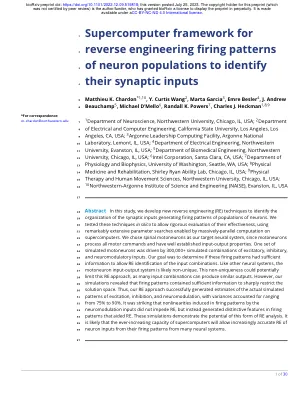
用于逆向工程神经元群体放电模式以识别其突触输入的超级计算机框架
m-chardon@northwestern.edu 1 美国伊利诺伊州芝加哥西北大学神经科学系;2 美国加利福尼亚州洛杉矶加州州立大学电气与计算机工程系;3 美国伊利诺伊州莱蒙特阿贡国家实验室阿贡领导力计算设施;4 美国伊利诺伊州埃文斯顿西北大学电气工程系;5 美国伊利诺伊州芝加哥西北大学生物医学工程系;6 英特尔公司,美国加利福尼亚州圣克拉拉;7 美国华盛顿大学生理学和生物物理学系;8 美国伊利诺伊州芝加哥 Shirley Ryan 能力实验室物理医学与康复系;9 美国伊利诺伊州芝加哥西北大学物理治疗与人体运动科学系; 15 10 美国伊利诺伊州埃文斯顿西北大学-阿贡科学与工程研究所 (NAISE) 16
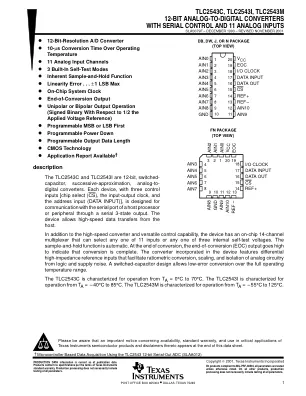
具有串行控制和 11 个模拟输入的 12 位模数转换器数据表 (Rev. F)
电源电压范围,V CC (见注释 1) –0.5 V 至 6.5 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .输出电压范围,V O –0.3 V 至 V CC + 0.3 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 正参考电压,V ref+ V CC + 0.1 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .负参考电压,V ref– –0.1 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 峰值输入电流,I I (任何输入) ± 20 mA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 峰值总输入电流,I I (所有输入) ± 30 mA . . . . . . . . . . . . . . . . . . . . . . . . 自然通风工作温度范围,T A :TLC2543C 0 ° C 至 70 ° C . . . . . . . . . . . . . . . . . . TLC2543I –40 ° C 至 85 ° C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 存储温度范围,T stg –65 ° C 至 150 ° C . . . . . . . . . . . . . . . . . . . . . . . . . . . .
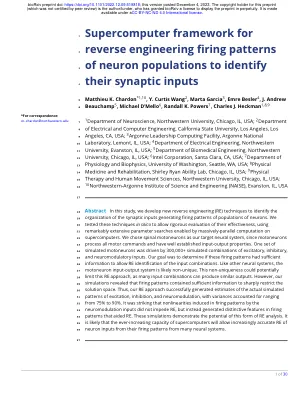
用于逆向工程神经元群体放电模式以识别其突触输入的超级计算机框架
m-chardon@northwestern.edu 1 美国伊利诺伊州芝加哥西北大学神经科学系;2 美国加利福尼亚州洛杉矶加州州立大学电气与计算机工程系;3 美国伊利诺伊州莱蒙特阿贡国家实验室阿贡领导力计算设施;4 美国伊利诺伊州埃文斯顿西北大学电气工程系;5 美国伊利诺伊州芝加哥西北大学生物医学工程系;6 英特尔公司,美国加利福尼亚州圣克拉拉;7 美国华盛顿大学生理学和生物物理学系;8 美国伊利诺伊州芝加哥 Shirley Ryan 能力实验室物理医学与康复系;9 美国伊利诺伊州芝加哥西北大学物理治疗与人体运动科学系; 15 10 美国伊利诺伊州埃文斯顿西北大学-阿贡科学与工程研究所 (NAISE) 16
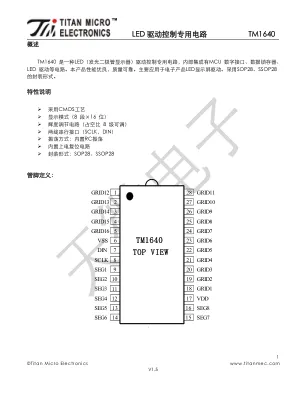
LED 驱动控制专用电路TM1640
微处理器的数据通过两线总线接口和TM1640 通信,在输入数据时当CLK 是高电平时,DIN 上的信号必须 保持不变;只有CLK 上的时钟信号为低电平时,DIN 上的信号才能改变。数据的输入总是低位在前,高位在后 传输.数据输入的开始条件是CLK 为高电平时,DIN 由高变低;结束条件是CLK 为高时,DIN 由低电平变为高 电平。

TFA9879 单声道 BTL D 类音频放大器,适用于具有数字输入的便携式应用
图 3 显示了 TFA9879 的上电和断电时序。在选择工作模式之前,外部电源电平 V DDP 和 V DDD 应在指定的工作范围内。必须将设备控制寄存器 ( 表 21 ) 中的位 POWERUP 设置为 1,然后才能通过位 OPMODE 选择工作模式。在开启延迟 (t d(on) ) 之后,设备会自动生成软取消静音功能。当 OPMODE 设置为 0 时,将生成软静音功能。在断开或关闭电源之前,应将 TFA9879 设置为断电模式。