XiaoMi-AI文件搜索系统
World File Search System运动限制

DCLDYN 降落伞充气和轨迹分析工具
1) 空中运输建模,包括运输飞机内部的货物运动限制 a。地板摩擦和约束 b。重力下降模型 c。 飞机坡道的弹射模型 2) 弹射座椅模型包括: a。 火箭/弹射器性能 b。 DRI 和类似的暴露计算 3) 重要的货物模型,包括: a。包括多个马赫数和 AOA 表的高端空气动力学模型 b。用于重新定位模拟的多个线束连接点模型 c。 与其他客户(如 NASA)的空气动力学数据库非常接近的空气动力学数据库 4) 轨迹重启功能大大减少了使用多个降落伞完成轨迹的工作量 5) 通过完成基本 DCLDYN 工具的外循环进行蒙特卡罗分析 6) 提供额外功能的重要变体,包括: a。客户可交付模拟,旨在附加到客户模拟 i。完全 6 自由度降落伞 ii。从客户模拟调用,为飞行模型提供高保真降落伞模型 b。 重新定位变体,在集群汇合和车辆之间提供高保真度的降落伞安全带 i。包括安全带释放和阻尼器输入通道,用于研究动态机动和潜在控制。7) 使用 FEA 工具,适当完成上述任务 a。降落伞的刚性和柔性表示之间的差异
DCLDYN 降落伞充气和轨迹分析工具
1) 空中运输建模,包括运输飞机内部的货物运动限制 a。地板摩擦和约束 b。重力下降模型 c。 飞机坡道的弹射模型 2) 弹射座椅模型包括: a。 火箭/弹射器性能 b。 DRI 和类似的暴露计算 3) 重要的货物模型,包括: a。高端空气动力学模型,包括多个马赫数和 AOA 表 b。用于重新定位模拟的多个线束连接点模型 c。 与其他客户(如 NASA)的空气动力学数据库非常接近的空气动力学数据库 4) 轨迹重启功能大大减少了使用多个降落伞完成轨迹的工作量 5) 通过完成基本 DCLDYN 工具的外循环进行蒙特卡罗分析 6) 提供额外功能的重要变体,包括: a。客户可交付模拟,旨在附加到客户模拟 i。完全 6 自由度降落伞 ii。从客户模拟调用,为飞行模型提供高保真降落伞模型 b。 重新定位变体,在集群汇合和车辆之间提供高保真度的降落伞安全带 i。包括安全带释放和阻尼器输入通道,用于研究动态机动和潜在控制。7) 使用 FEA 工具,适当完成上述任务 a。降落伞的刚性和柔性表示之间的差异

躺下时使用虚拟现实的研究
在大多数虚拟现实 (VR) 应用中,用户要么站着,要么坐着。通常情况下,用户不仅仅是站着不动,而是使用自然运动在虚拟环境中移动。事实上,Steam 1 上十大最畅销 VR 游戏中有八款允许用户通过躲避障碍物、绕过角落、倾斜瞄准武器或伸手去拿物体来进行交互。在研究中,人们也越来越关注我们在 VR 中如何穿越物理空间,例如,在 VR 中跳舞 [ 39 ]、使用基于步行的运动(例如 [ 37 , 49 ])或意外移出跟踪空间 [ 6 ]。即使坐着,用户仍然可以利用他们的躯干和手臂来倾斜、伸手去拿按钮或抓住地面上的东西。然而,我们不清楚如何在躺着的时候使用 VR。我们大部分时间都躺在床上或沙发上,每天最多花四个小时进行娱乐 [ 16 , 42 ]。躺着的时候,VR 可以用来在虚拟天花板上看电影(例如,通过 Netfix VR 或 Bigscreen VR),享受引导式放松或冥想(例如,[ 12 , 28 ]),观看 360 度视频,甚至睡觉(例如,[ 46 , 54 ])。除了流行的用途之外,VR 在用户通常躺着的区域也越来越受欢迎。在医学和康复领域,VR 可以改善治疗 [ 3 ] 并缓解疼痛 [ 35 , 45 ]。在神经科学中,VR 已用于使用 MRI 或 EEG 的研究 [ 29 ]。然而,这些虚拟现实体验通常受到仅限旋转跟踪、固定使用设计或受限环境的限制。戴上 VR 耳机上床或躺在沙发上会带来许多挑战。首先,当用户躺下时,他们会盯着天花板或天空——通常不是环境中最令人兴奋的部分。其次,虚拟视角可以旋转,让用户虚拟地向前看,但这会破坏他们在现实世界和虚拟世界中的身体姿势之间的映射。第三,与自由站立相比,用户所躺的表面可能会施加显着的运动限制。以下是我们要解决的一些未解决的问题:用户如何移动?他们想如何互动?躺着使用虚拟现实时,他们感觉如何?我们调查了躺着时流行的 VR 应用的用户体验和运动要求。我们为 SteamVR 开发了一个自定义驱动程序来转换虚拟坐标空间;
2021布隆迪联合难民返回和重返社会计划
前言这个联合难民返回和重返社会计划(2021年)源于布隆迪当局,难民署,开发计划署和合作伙伴的坚定承诺,以支持返回难民的可持续解决方案,以使他们能够以尊严和和平的方式重建生活。该计划规定了实施赋予难民权力的活动的实施,增强了回归领域的回归者和当地人口的韧性,并促进社会凝聚力和和平的共存,从而促进了整个大湖地区的稳定。自2017年以来,超过12万个伯迪亚人返回了他们的国家。尽管1920年造成了国际和国内运动限制,但造成了国际和国内运动的限制,但2020年从坦桑尼亚,卢旺达,刚果民主共和国(刚果民主共和国),乌干达和肯尼亚返回了布隆迪。这种向上趋势预计将在2021年继续。难民对返回布隆迪的兴趣日益增加,再加上具有挑战性的环境,强调了需要创新和长期干预措施以支持返回者和寄宿社区以实现自力更生和韧性。考虑到这一点,该战略重点是实施生计项目,寻找剥削价值链的市场以及通过包容性,全国领导和社区驱动的方法来加强对卫生服务,水与卫生服务,水和卫生服务,水和卫生服务,教育,社会保护和人权的攻击。该联合难民返回和重返社会计划的成功(2021)将在很大程度上取决于动员足够和及时的资金。布隆迪政府正在努力确保返回者能够通过其机构机构促进其经济和社会融合,即遣返,重新融合,回归者和战争流离失所者的总局。正在制定各种倡议,包括部长理事会在2017年采用的灾难受害者社会经济重新融入的国家战略(2017-2021)以及2018 - 2027年的国家发展计划,旨在以三倍的目标:重新建立了统治的范围,以供应量身强化,以恢复统治,以供应,以供应,以恢复统治的范围,并促进了统治Zones的范围,并促进了强化的统治ZONES的统治,并促进了统治的统治,并促进了统治的统治,并促进了强化的统治Zones Zone的统治,并促进了强化的统治,并具有启用ZONES的强化,并促进了统治的范围,并促进了统治范围的统治。在返回者的重新融合中,仅举几例。我们的努力需要广泛的参与者的合作和参与,以维持安全,有尊严的遣返,恢复地方一级的个人权利,并支持加强确保可持续性重新融入所必需的国家和地方结构。总而言之,布隆迪政府坚信,该计划是寻求解决方案的重要一步,可以为长期发展前景设定基准,从而使返回和当地社区受益,他们在整个过程中仍然是驾驶行为者。首席警察专员,内政部,社区发展和公共安全部长Gervais Ndirakobuca将军
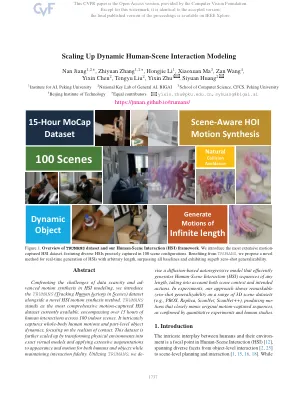
扩展动态的人类场景相互作用建模
已经取得了显着的迈进,该领域显然是由于缺乏高质量数据集而导致的。早期数据集(如Pigraphs [39]和Prox [16])启动了探索,但受到可扩展性和数据质量的约束。MOCAP数据集[14,30]使用Vicon等复杂的设备优先考虑高质量的人类运动限制。但是,他们通常缺乏捕获多样化和沉浸式的HSI。通过RGBD视频录制的可扩展数据集提供了更广泛的实用程序,但受到人类姿势和对象跟踪质量较低的阻碍。合成数据集的出现[1,3,4,55]提供了成本效率和适应性,但无法封装完整的现实HSI频谱,尤其是在捕获动态3D触点和对象跟踪时。为了应对这些挑战,这项工作首先引入了trumans(t rack hum a um a u u u u u u u u u u u u u u a ctio n s in s cenes)数据集。Trumans成为最广泛的运动捕获HSI数据集,涵盖了15个小时以上15个小时的室内场景中的各种相互作用。它捕获了全身的人类动作和部分级别的对象动力学,重点是接触的现实主义。通过将物理环境复制到准确的虚拟模型中,可以进一步增强此数据集。外观和运动的广泛增强都应用于人类和物体,以确保相互作用的高度有限。接下来,我们设计了一个计算模型,通过将场景和动作作为条件同时采取行动来应对上述挑战。我们对杜鲁士数据集和运动合成方法进行了全面的交叉评估。特别是,我们的模型采用自回归的条件扩散,场景和动作嵌入作为征用输入,能够产生任意长度的运动。为了整合场景上下文,我们通过在本地化的基础上查询全局场景的占用来开发有效的场景感知者,这在导航杂乱的场景时表现出了3D感知的碰撞避免的强大效率。为了将框架的动作标签合并为条件,我们将时间特征集成到动作片段中,使模型在粘附在给定的动作标签时随时接受指令。场景和动作条件的这种双重整合增强了我们方法的可控性,为在3D场景中合成合理的长期运动提供了细微的界面。将trumans与现有人物进行比较,我们证明了杜鲁士人明显提高了最先进的方法的性能。此外,我们的方法在定性和定量上进行了评估,超过了现有的运动综合方法,其质量和零击性能力在看不见的3D场景上,非常接近原始运动捕获数据的质量。除了运动合成之外,杜鲁士人已经针对人类的姿势和接触估计任务进行了基准测试,证明了其多功能性并将其确立为一系列未来的研究努力的宝贵资产。
使用伪凸凸优化的信号走廊中连接车辆的文章类型实时控制†
没有人类驾驶员的干预,并与其他车辆和/或基础设施以及其他设备2进行通信2。美国运输部总结了将CAV技术引入运输系统3:道路安全,经济和社会福利,能源效率和公共流动性的四个主要潜在好处。CAV技术为驾驶员/车辆和交通基础设施创造了一个新的环境,以在现实世界中进行交互。在这种环境中,连接起着至关重要的作用,无线通信使车辆能够相互通信(V2V)以及基础架构(V2I)(v2i)关于实时车辆位置,速度,加速度和其他数据。这些实时数据的可用性为CAVS提供了协调交通相互作用的机会,以使交通相互作用,以最大程度地提高燃油效率并减少碰撞4。猜测对自动运输系统进行了实质性转变,已经进行了许多研究,以调查涉及CAV应用程序的挑战和机会5,6,7,8。例如,橡树岭国家实验室9正在开发用于CAVS应用程序的实时移动控制系统(RTMC),其中包括流量数据管理,路线计划,集中式通信和可视化。已经证明,可以使用交通信号阶段和计时(SPAT)信息来提高车辆燃油效率以协调车辆操作10。还已经确定,可以通过解决相关的最佳控制问题4来确定车辆的最佳速度方案。然而,尽管许多研究人员已经证明了使用SPAT信息来优化燃油经济性的潜力,但大多数努力都集中在提高单个车辆的性能并发出信号计时控制11,12。此外,相关作品主要集中于为CAV生成可行的轨迹,同时忽略了以计算效率和保证收敛性来实时执行生成的轨迹。骑士的运动控制系统是安全至关重要的,并严重依赖于车载算法。需要对操作的实时更新,以应对周围环境的动态。尽管已经提出了许多方法来获得轨迹的轨迹,但由于高计算成本,无法保证最佳解决方案,并且无法应付非凸运动限制和动态环境,因此它们的优化方法不适合现实世界实施。13,14。本文将通过开发一种基于凸优化的新型方法来满足这种需求,该方法使用SPAT信息产生速度曲线。具有多项式解决方案时间和全球最佳收敛的优点,凸优化方法对于车载应用非常有前途。这项研究的贡献是三倍。首先,提出的顺序凸编程(SCP)算法解决了非线性和非凸的最佳速度控制问题,并确保收敛性和多项式解决方案时间在解决每个步骤中解决凸的问题时。本文的其余部分如下:第2节对相关工作进行了简要审查。第二,我们利用伪搭配方法与线路搜索和信任区域技术结合使用,从根本上改善了提出的SCP算法,以提高准确性,更好的实时和融合性能。第三,得益于高级计算效率,该提出的方法实现了实时模型预测控制(MPC)框架,并对动态交通环境的即时响应,以避免碰撞和车辆协调。第3节描述了本研究中考虑的系统动力学和最佳控制问题。第4节介绍了一种新方法,该方法确定了在信号走廊中行驶的骑士的最佳车辆速度轮廓。第5节通过模拟结果和比较证明了拟议方法的性能和有效性。第6节总结了本文的工作。