XiaoMi-AI文件搜索系统
World File Search System运动

用活动摄像头在夜间看到运动
我们专注于一项非常具有挑战性的任务:在夜间动态场景时进行成像。大多数以前的方法都依赖于常规RGB摄像机的低光增强。,他们不可避免地会在夜间长时间的长时间和动作场景的动作模糊之间面临困境。事件摄像机对动态变化的反应,其时间分辨率较高(微秒)和较高的动态范围(120dB),提供了替代解决方案。在这项工作中,我们使用活动摄像头提出了一种新颖的夜间动态成像方法。具体来说,我们发现夜间的事件表现出时间段落的特征和空间非平稳分布。conse-我们提出了一个夜间活动重建网络(NER-NET),主要包括可学习的事件时间戳校准模块(LETC),以使临时尾随事件和非均匀照明式落后事件保持一致,以稳定事件的spatiotalmorporal分布。此外,我们通过同轴成像系统构建了配对的真实低光事件数据集(RLED),这包括空间和时间对齐的图像GTS和低光事件的64,200个。广泛的实验表明,在视觉质量和泛化能力方面,所提出的方法优于最先进的方法。

深脑电气神经反馈允许帕金森患者控制病理振荡并加快运动
帕金森运动症状与基底神经节中病理上增加的β振荡有关。虽然药理学治疗和深脑刺激(DBS)降低了这些病理振荡,并随着运动性能的提高而降低了这些病理振荡,但我们着手探索神经反馈作为内源性调节方法。我们通过植入的DBS电极实施了病理性亚丘脑β振荡的实时处理,以提供深脑电气神经反馈。患者在训练后几分钟内通过视觉神经反馈进行了视觉控制的β振荡活动。在一次单小时的训练中,β振荡活动的减少逐渐变得更强大,我们观察到了运动性能的提高。最后,即使去除视觉神经反馈后,对深脑活动的内源性控制也是可能的,这表明在短期内保留了神经反馈获得的策略。此外,我们观察到2天后学习的心理策略在没有神经反馈的情况下进行了改善。进一步训练深脑神经反馈可能会通过使用神经反馈优化的策略来改善症状控制,从而为帕金森患者提供治疗益处。

三模式运动通过学习联合嵌入空间
信息检索是一个不断发展且至关重要的搜索域。对高质量人类运动数据的大量需求,尤其是在在线获取中,导致人类运动研究工作的激增。先前的作品主要集中在双模式学习上,例如文本和运动任务,但是很少探索三模式学习。直觉上,额外的引入方式可以丰富模型的应用程序方案,更重要的是,对额外模式的适当选择也可以充当中介,并增强其他两个不同方式之间的对齐方式。在这项工作中,我们介绍了Lavimo(语言视频 - 动作对齐),这是一个三模式学习的新型框架,将以人为中心的视频整合为一种额外的方式,从而可以在文本和运动之间弥合差距。更重要的是,我们的方法利用了一种专门设计的注意机制来增强文本,视频和运动方式之间的一致性和协同作用。经验,我们对HumanML3D和Kit-ML数据集的结果表明,Lavimo在各种与运动相关的跨模式检索任务中实现了最先进的表现,包括文本到动作,动作到运动,视频,视频到视频,动作和动态。我们的项目网页可以在https://lavimo2023.github.io/lavimo/中找到。

一种线性可扩展的多伪影去除方法,用于改进基于上肢脑电图的运动想象解码 Mojisola Grace Asogbon 1,2 , Oluwa
图 1:使用国际 10-20 系统从 (a) 矢状面和 (b) 轴平面 (c) 头皮角度看到的 64 个电极配置表示。注意:A= 耳垂,C = 中央,Pg = 鼻咽,P = 顶叶,F = 额叶,Fp = 额极和 O = 枕叶。

热和听觉不愉快刺激对健康个体中运动图像的影响
。CC-BY 4.0国际许可证可永久提供。是作者/资助者,他已授予Medrxiv的许可证,以显示预印本(未通过同行评审证明)预印版本的版权所有者此版本发布于2025年3月10日。 https://doi.org/10.1101/2025.03.06.25323546 doi:medrxiv preprint

营养教育的运动员偏好:定量调查的开发和发现
“微生物感染和宿主免疫”上的特刊旨在阐明微生物病原体与宿主免疫系统之间的复杂相互作用。本期特刊旨在探索了解微生物感染背后的机制和相应宿主免疫反应的最新进步。我们欢迎原始的研究文章,评论和观点研究各种微生物感染的发病机理,新型治疗策略的发展以及宿主免疫系统在对抗这些感染中的作用。我们鼓励提交,以解决微生物和免疫学方面的基本问题,以及提供与人类健康相关的临床见解的提交问题。通过培养跨学科对话,这一特殊问题努力为微生物感染和宿主免疫的知识不断增长做出贡献。提交将为学术界提供宝贵的贡献,并促进我们对这些相互关联的领域的理解。
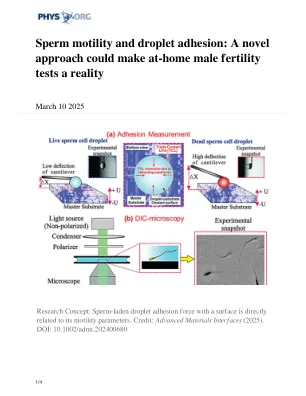
精子运动和液滴粘附:一种新颖的方法可以使居住的男性生育测试成为现实
“这样想:活跃的游泳精子可以帮助液滴放手,”机械和机电一体化工程学教授兼滑铁卢纳米技术研究所执行董事Sushanta Mitra博士说。“精子越活跃,液滴棒的越少。”

MTR V3:2024 Waymo Open DataSet挑战的第一名解决方案 - 运动预测
我们介绍了Gemma 3,这是吉玛(Gemma)的轻型开放模型家族的多模式,规模从1到270亿个参数不等。此版本介绍了视觉理解能力,更广泛的语言覆盖范围和更长的上下文 - 至少128K令牌。我们还更改了模型的体系结构,以减少往往会在长上下文中爆炸的KV-CACHE内存。这是通过增加本地注意层与全球注意力层的比率并保持局部注意力的范围来实现的。Gemma 3型号经过蒸馏训练,并为预训练和指令固定版本提供了超过Gemma 2的性能。,我们的新型培训后食谱可显着改善数学,聊天,指导跟踪和多语言能力,从而使Gemma3-4B-IT与Gemma2-27b-it和gemma3-27b-it和gemma3-27b-it竞争与Geminii-1.5-Pro可比。我们将所有模型都发布给社区。

vmts:双皮德机器人中多刺运动的视觉辅助教师增强学习
摘要 - 双方机器人由于其拟人化设计,在各种应用中提供了巨大的潜力,但其结构的复杂性阻碍了它们的控制。当前,大多数研究都集中在基于本体感受的方法上,这些方法缺乏克服复杂地形的能力。虽然视觉感知对于在以人为中心的环境中运作至关重要,但其整合使控制进一步复杂化。最近的强化学习(RL)方法已经显示出在增强腿部机器人运动方面的希望,特别是基于本体感受的方法。然而,地形适应性,尤其是对于两足机器人,仍然是一个重大挑战,大多数研究都集中在平坦的情况下。在本文中,我们介绍了专家教师网络RL策略的新型混合物,该策略通过一种简单而有效的方法来增强基于视觉投入的教师策略的绩效。我们的方法将地形选择策略与教师政策结合在一起,与传统模型相比,表现出色。此外,我们还引入了教师和学生网络之间的一致性损失,而不是强制实施相似之处,以提高学生驾驶各种地形的能力。我们在Limx Dynamic P1 Bipedal机器人上实验验证了我们的方法,证明了其跨毛线地形类型的可行性和鲁棒性。索引术语 - Bipedal机器人,增强学习,视觉感知的控制