XiaoMi-AI文件搜索系统
World File Search System适应控制
船舶操控台控制界面人机工程设计标准研究
控制器等方面提出了工效学设计要求。 从国外组织来看,国外涉及船舶驾驶室操控界面的标准主要包括:国际海事组织IMO 于2000 年制定的标准《船桥设备和布局的工效学指南》( MSC/ Circ.982 ) [16] ,内容涉及船桥(包括驾驶室)布置、 作业环境、工作站布置、报警、控制界面、信息显示、 交互控制等7 个方面的驾驶室人机界面设计要求。国际海上人命安全公约SOLAS 于2007 年制定的标准《船桥设计、设备布局和程序》( SOLAS V/15 ) [17] , 内容涉及驾驶室功能设计、航海系统及设备设计、布置、船桥程序等,其显着特点是对于驾驶室团队管理作出相关要求,包括船桥程序、船员培训等。 从各个国家来看,美、英等西方国家在军事系 统工效学方面的研究已具有较大的规模,也制定了 一系列军用标准。美国军方军事系统的人机工程学设计准则包括“ 人机工程系统的分析数据” ( MIL.H.sl444 ) [118] , “ 军事系统人机工程学设计准则” ( MIL.STD.1472F ) [19] ,以及1999 年修订的“ 人机工程过程和程序标准” ( MIL.STD.46855A ) [20] 。 MIL-STD-1472 的第一版发布于20 世纪60 年代( 1968 年),在第二次世界大战期间,当时各交战国竞相发展新的高性能武器装备,但由于人机界面设计上的不合理,人难以掌握这些新性能的武器,导致发生了许许多多事故。因此,二次大战结束后,首先美国陆航部队(以后成为美国空军)和美国海军建立了工程心理学实验室,进行了大量的控制器、显示器等的人因素研究,获得了大量的数据,并开始将这些研究成果汇编成手册或制订成各种有关人类工程学的标准或规范。 MIL-STD-1472 就是在这样的时代背景下产生 的。该标准是为军用系统、子系统、设备和设施制定通用人类工程学设计准则,由美国陆军、海军和空军等多个单位评审,美国国防部批准,并强制性要求美国国防部所有单位和机构使用,具有较广泛的影响。 该标准在控制 - 显示综合和控制器章节有针对控制器 通用设计规则的阐述。 美国在船舶人机工程领域的投入力度也较大,不但开展了一系列的船舶人机工程专项试验,而且颁布了多项船舶人机工程设计标准和文件,主要侧重于研究人机环境对船舶的战斗力的影响。其中, ASTMF 1166—88 海军系统装备和设施的人因素工程设计标准是一个通用型标准,涵盖了控制、显示和告警、楼梯和台阶、标识和计算机、工作空间布局等海军设计的所有元素[21 ] 。 英国国防部于2005 年组织建立的船舶SRDs 系统,对船舶人机界面涉及的多方面问题进行梳理和整合,将人机界面研究作为船舶系统设计的一个重要环节,以提高人机界面设计在船舶项目中的优先级别。 英国国防部 2009 年的 MARS 项目计划,将早期人机 界面设计干预纳入到舰艇设计系统中,并委任专业公
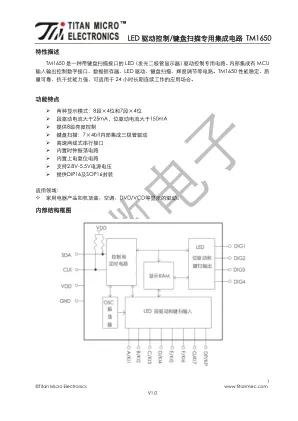
LED 驱动控制/键盘扫描专用集成电路TM1650
接口和TM1650 通信,在输入数据时当SCL 是高电平时,SDA 上的信号必须保持不变;只有SCL 上的 时钟信号为低电平时,SDA 上的信号才能改变。数据输入的开始条件是SCL 为高电平时,SDA 由高变

算法控制、角色压力与员工变革态度的关系研究
技术和算法越来越多地渗透到日常工作的管理中,特别表现出在员工控制中的巨大潜力。为了深入探索算法控制对员工对数字传输背景下改变态度的态度的影响,这项研究以角色理论为基础,并深入了解算法控制的概念,构建了一个调解模型,包括算法,算法,责任控制,员工的承诺,雇员的承诺,以改变和变化。利用在线和离线问卷调查方法中,本研究验证了算法控制对就业对变革及其基础途径的态度的影响。研究结果表明,算法控制大大加剧了员工的角色压力,随后提高了他们对变革的抵抗力,并相应地减少了他们对变革的承诺。这项研究不仅为组织环境中算法控制的研究开辟了新的理论观点,而且还为努力实施科学问题的组织提供了宝贵的实践指导。
基于近端策略优化算法及视觉感知的机械臂导纳控制研究
在现代操纵器交互任务中,由于环境的复杂性和不确定性,准确的对象表面建模通常很难实现。因此,改善操纵器与环境之间相互作用的适应性和稳定性已成为相互作用任务的重点之一。针对操纵器的互动任务,本文旨在在视觉指导下实现良好的力量控制。因此,基于Mujoco(带有触点的多关节动力学)物理引擎,我们为操纵器构建了交互式仿真环境,并创新地集成了基于位置的视觉伺服控制和录取控制。通过深度强化学习(DRL)中的近端策略优化(PPO)算法,有效地集成了视觉信息和力量信息,并提出了结合视觉感知的接收性控制策略。通过比较实验,将允许控制与视觉感知相结合,并将力控制的整体性能提高了68.75%。与经典的入学控制相比,峰值控制精度提高了15%。 实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。与经典的入学控制相比,峰值控制精度提高了15%。实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。在精确组装,医疗援助和服务操纵器的领域中,它可以提高操纵器在复杂和不确定的环境中的适应能力和稳定性,从而促进智能操纵器的自主操作的发展。

智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。


基于学习的推进控制,用于动态适应不断变化的环境
摘要 - 本文提出了一种基于学习的自适应推进控制(APC)方法,用于与两栖环境中推进器集成的四倍的机器人,从而使其能够在水中有效地移动,同时保持其地面局限性功能。我们设计了特定的增强学习方法,以训练神经网络以执行向量推进控制。我们的方法协调腿和螺旋桨,使机器人能够在执行器故障和未知干扰的情况下实现速度和轨迹跟踪任务。我们对水中机器人的模拟验证证明了训练有素的神经网络根据历史信息预测干扰和执行器故障的有效性,这表明该框架适应不断变化的环境,适合在动态变化的情况下使用。我们提出的方法适合于四倍的机器人的硬件增强,以在两栖机器人的领域创建途径,并扩展了在各种应用程序中使用四倍的机器人的使用。

基于生物信号的共同适应用户机器接口,用于电机控制
抽象的用户机器接口映射从用户测量的生物信号,以控制外部设备的控制命令。从生物信号到设备输入的映射由解码算法执行。对用户和解码器的改编(共同适应)提供了提高不同用户和应用程序接口的包容性和可用性的机会。用户学习会导致可靠的接口控制,可以跨环境和上下文概括。解码器适应性可以个性化接口,说明日常信号变异性并提高整体性能。共同适应创造了塑造用户和解码器系统以实现可靠且可推广的个性化接口的机会。但是,共同适应创建了一个两学习系统,并在用户和解码器之间进行动态交互。工程共同自适应接口需要新的工具和框架来分析和设计用户 - 码头交互。在本文中,我们回顾了自适应解码,用户学习和在用户机器接口中的共同适应,可用于运动控制的用户机器接口,脑中脑部脑部计算机,肌电和运动接口。然后,我们讨论了自适应接口的性能标准,并提出了一种设计用户decoder共同适应的游戏理论方法。