XiaoMi-AI文件搜索系统
World File Search System遥控操作

轮式人形机器人的动态运动遥控操作...
摘要 — 双边遥控操作为人形机器人提供了人类的规划智能,同时使人类能够感受到机器人的感受。它有可能将具有物理能力的人形机器人转变为动态智能的机器人。然而,由于涉及复杂的动力学,动态双边运动遥控操作仍然是一个挑战。这项工作介绍了我们通过身体倾斜的轮式人形机器人运动遥控概念应对这一挑战的初步步骤。具体来说,我们开发了一种具有力反馈能力的全身人机界面 (HMI),并设计了一个力反馈映射和两个遥控映射,将人体倾斜映射到机器人的速度或加速度。我们比较了这两种映射,并通过实验研究了力反馈的效果,其中七个人类受试者用 HMI 遥控一个模拟机器人执行动态目标跟踪任务。实验结果表明,所有受试者在练习后都完成了两种映射的任务,力反馈提高了他们的表现。然而,受试者表现出两种不同的远程操作风格,它们从力反馈中获益的方式也不同。此外,力反馈影响了受试者对远程操作映射的偏好,尽管大多数受试者在速度映射方面表现更好。
轮式人形机器人的动态运动遥控操作...
摘要 — 双边遥控操作为人形机器人提供了人类的规划智能,同时使人类能够感受到机器人的感受。它有可能将具有物理能力的人形机器人转变为动态智能的机器人。然而,由于涉及复杂的动力学,动态双边运动遥控操作仍然是一个挑战。这项工作介绍了我们通过身体倾斜的轮式人形机器人运动遥控概念应对这一挑战的初步步骤。具体来说,我们开发了一种具有力反馈能力的全身人机界面 (HMI),并设计了一个力反馈映射和两个遥控映射,将人体倾斜映射到机器人的速度或加速度。我们比较了这两种映射,并通过实验研究了力反馈的效果,其中七个人类受试者用 HMI 遥控一个模拟机器人执行动态目标跟踪任务。实验结果表明,所有受试者在练习后都完成了两种映射的任务,力反馈提高了他们的表现。然而,受试者表现出两种不同的远程操作风格,它们从力反馈中获益的方式也不同。此外,力反馈影响了受试者对远程操作映射的偏好,尽管大多数受试者在速度映射方面表现更好。

四种月球通信延迟条件下月球地形车(LTV)远程遥控操作研究
首字母缩略词 .cvs Excel codex ⁰ 度 < 小于 % 百分比 ABC Artemis 大本营 ACES 学院颜色编码系统 ANOVA 方差分析 CEL 概念探索实验室 cm 厘米 conops 作战概念 deg 度 DEM 数字环境模型 DOUG 动态机载无处不在的图形 DRATS 沙漠研究和技术研究 DSN 深空网络 DTE 直接对地 EDGE 探索图形 EHP 美国宇航局的舱外活动和人类地面机动计划 ESDMD 探索系统发展任务理事会 EVA 舱外活动 F ANOVA F 值 FOD 异物碎片 FOV 视场 fps 每秒帧数 GUNNS 通用节点网络求解器软件 HAB 栖息地 HDR 高数据速率 HITL 人在回路 hh:mm:ss 小时、分钟、秒 IES 照明工程学会 IMU 惯性测量单元 ISRU 现场资源利用单元 JEOD 约翰逊航天中心工程轨道动力学集团 JSC 约翰逊航天中心 kg 千克 km 公里 kph 公里每小时 千瓦 千瓦时 千瓦每小时 激光雷达 光增强探测与测距

杰里迈亚·M·科霍利奇
机器人感知与学习实验室研究生 2020 年 6 月 - 至今 • 使用 Meta Quest 3 和 Franka Emika Panda 机器人设置 VR 遥控操作管道 • 在机器人演示中微调大型视觉语言模型以供操作 • 为模拟中的四足机器人开发和实施基于学习的新型规划和控制算法 • 实施用于可重复训练 RL 策略、多 GPU 策略评估和数据收集的管道
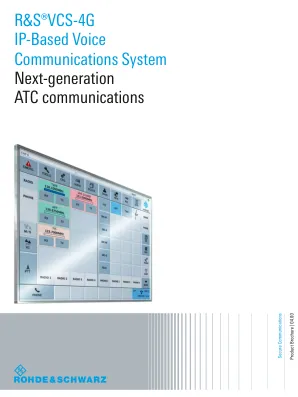
R&S®VCS-4G 基于 IP 的语音通信系统
R&S®VCS-4G 基于 IP 的语音通信系统 一览 R&S®VCS-4G 专为民用 ATC 和防空 (AD) 部署而设计。它支持空中交通管制员和飞行员之间进行全功能无线电通信,必要时包括特定的无线电遥控操作。对于地对地通信,它还提供全方位的 ATC 功能,并与传统模拟和数字 VCS 以及其他相关空中交通管理 (ATM) 系统(如语音记录器)进行广泛的互通。还支持其他语音服务,如对讲机、电话和 IP PABX。这种完全基于 IP 的通信系统的主要优势之一是其高度可扩展性。它允许使用相同的技术和设备类型进行从单个管制员工作岗位 (CWP) 到全尺寸区域管制中心 (ACC) 的系统部署。此外,该系统旨在提供完全冗余,包括分布在各个站点以实现地理冗余。
R&S®VCS-4G 基于 IP 的语音通信系统
R&S®VCS-4G 基于 IP 的语音通信系统 一览 R&S®VCS-4G 专为民用 ATC 和防空 (AD) 部署而设计。它支持空中交通管制员和飞行员之间的全功能无线电通信,包括必要时的特定无线电遥控操作。对于地对地通信,它还提供全方位的 ATC 功能,并与传统模拟和数字 VCS 以及其他相关空中交通管理 (ATM) 系统(如语音记录器)进行广泛的互通。还支持其他语音服务,例如对讲机、电话和 IP PABX。这种完全基于 IP 的通信系统的主要优势之一是其非常高的可扩展性。它允许使用相同技术和设备类型的系统部署,从单个控制器工作位置 (CWP) 到全尺寸区域控制中心 (ACC)。此外,该系统旨在提供完全冗余,包括在不同站点进行分布式部署以实现地理冗余。

太空机器人远程指挥与控制的通用框架
未来的太空任务预计会越来越多地实现无人驾驶,并有望由机器人执行驻留任务。机器人技术的最新水平使得在严格的太空安全标准下实现完全自主操作极具挑战性。同时,太空中的机器人与地球上的操作员之间的通信延迟使得传统的遥控操作速度极其缓慢。我们开发了一个与硬件无关的远程操作机器人框架,该框架弥合了完全自主和遥控操作之间的差距。该框架提供了参数化的可重复使用的构建块(称为行为),用于执行一般的机器人操作,例如打开舱口、按下按钮和拾起物体。使用这些行为时,操作员提供一些命令输入并批准自动计算的计划,然后才能远程执行。这些行为还可以组合成更复杂的目标,这些目标可以在特定行为失败时编码后备行为,或者编码依赖于用户或传感器输入的条件行为。
陆军可选载人战车 (OMFV) 计划:国会背景和问题
可选载人。它必须能够在机组人员不在平台时进行遥控操作。5 容量。它最终应该在不超过两名机组人员的情况下运行,并且在装甲下有足够的空间来运载至少六名士兵。 可运输性。两辆 OMFV 应该可以由一架 C-17 运输,并在 15 分钟内做好战斗准备。 密集城市地形作战和机动性。平台应包括超高武器能力,并同时使用主炮和独立武器系统打击威胁。 防护。它必须具备在当代和未来战场上生存所需的防护。 增长。它应该拥有足够的尺寸、重量、架构、功率和用于汽车和电气用途的冷却,以满足所有平台需求并允许预先计划的产品改进。 杀伤力。它应该在白天/夜晚/全天候条件下,在移动和/或静止状态下,对移动和/或静止目标进行即时、精确和决定性致命的远程中口径、定向能和导弹射击。该平台应允许安装、卸载和无人系统目标交接。

手臂交互的电触觉反馈应用:系统评价、荟萃分析和未来方向
摘要 — 触觉反馈在广泛的人机/计算机交互应用中至关重要。然而,触觉设备的高成本和低便携性/可穿戴性仍然是尚未解决的问题,严重限制了这种原本很有前途的技术的采用。电触觉界面具有更便携和更可穿戴的优势,因为它们的执行器尺寸减小,功耗和制造成本更低。电触觉反馈在人机交互和人机交互中的应用已被探索,以促进假肢、虚拟现实、机器人遥控操作、表面触觉、便携式设备和康复等应用中的基于手的交互。本文介绍了电触觉反馈的技术概述,以及其在基于手的交互中的应用的系统综述和荟萃分析。我们根据应用类型讨论了不同的电触觉系统。我们还对研究结果进行了定量讨论,以提供对最新技术的高层次概述并提出未来的方向。电触觉反馈系统显示出更高的便携性/可穿戴性,并且它们成功地呈现和/或增强了大多数触觉、引发感知过程并在许多场景中提高了性能。然而,我们发现了知识差距(例如,实施方案)、技术(例如,反复校准、电极的耐用性)和方法(例如,样本大小)缺陷,这些缺陷应在未来的研究中得到解决。

移动机械手遥操作的性能和可用性评估方案
摘要 — 本文介绍了一种标准化的移动机械手人机遥控界面 (HRTI) 评估方案。遥控操作仍然是开放环境中移动机械手的主要控制类型,尤其是四足机械手。然而,与传统机械相比,移动机械手,尤其是四足机械手,在工业中实施的系统相对较新。因此,尚未为它们建立标准化的界面评估方法。所提出的方案是评估移动机械手遥控操作的首个方案。它包括一组机器人运动测试、客观测量、主观测量和预测模型,以提供全面的评估。运动测试包括运动、操纵和综合测试。每次试验的持续时间被收集为客观测量中的响应变量。统计工具(包括平均值、标准差和 T 检验)用于交叉比较不同的预测变量。基于扩展的 Fitts 定律,预测模型采用时间和任务难度指数来预测未来任务中的系统性能。主观测量利用 NASA 任务负荷指数和系统可用性量表来评估工作量和可用性。最后,提出的方案在现实世界的四足操纵器上实施,该操纵器具有两个广泛使用的 HRTI、游戏手柄和可穿戴运动捕捉系统。