XiaoMi-AI文件搜索系统
World File Search System配准

地球遥感图像的多传感器配准
假设系统校正系统在几个像素内给出近似配准,我们开发了用于多传感器数据的自动图像配准方法,目标是实现亚像素精度。自动图像配准通常由三个步骤定义:特征提取、特征匹配和数据重采样或融合。我们之前的工作重点是基于使用不同特征的图像相关方法。在本文中,我们研究了不同的特征匹配技术,并提出了五种算法,其中特征是原始灰度或小波类特征,特征匹配基于梯度下降优化、统计稳健匹配和互信息。这些算法在多个多传感器数据集上进行了测试和比较,这些数据集覆盖了 EOS 核心站点之一,即堪萨斯州的 Konza Prairie,来自四个不同的传感器:IKONOS(4m)、Landsat-7/ETM+(30m)、MODIS(500m)和 SeaWIFS(1 000m)。


地理配准最佳实践指南
出版商:哥本哈根全球生物多样性信息机构 http://www.gbif.org 版权所有 © 2006 加州大学董事会。保留所有权利。本书中的信息代表作者的专业意见,并不一定代表出版商或加州大学董事会的观点。尽管作者和出版商已尝试使本书尽可能准确和全面,但此处包含的信息是“按原样”提供的,并且不对其准确性或完整性提供任何保证。作者、出版商和加州大学董事会对任何个人或实体因使用本书中提供的信息而造成的任何损失或损害不承担任何责任。地理参考最佳实践指南包括索引 ISBN:87-92020-00-3 推荐引用:Chapman,AD 和 J. Wieczorek(编辑)。2006 年。地理参考最佳实践指南。哥本哈根:全球生物多样性信息机构。编辑:Arthur D. Chapman 和 John Wieczorek 撰稿人:J.Wieczorek、R.Guralnick、A.Chapman、C.Frazier、N.Rios、R.Beaman、Q.Guo。
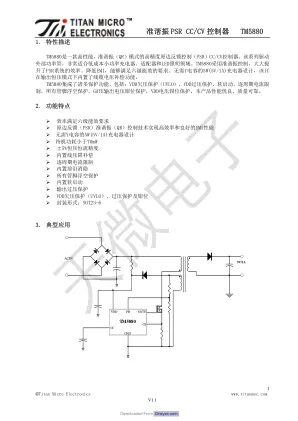
准谐振PSR CC/CV 控制器TM5880
VDD欠压保护 UVLO(OFF) VDD 电压下降 8.5 9.5 10.5 V VDD启动电压 UVLO(ON) VDD 电压上升 14 15.5 16.5 V VDD过压保护 VDD_OVP 31 33 35 V VDD钳位电压 VDD_Clamp I(VDD)=7mA 33 35 37 V 反馈输入部分(FB管脚) 反馈参考电压 VFB_EA_Ref 1.98 2.0 2.02 V 输出过压保护阈值电压 VFB_OVP 2.4 V 输出短路阈值 VFB_Short 0.65 V 输出短路钳位频率 FClamp_Short 40 KHz 退磁比较器阈值 VFB_DEM 75 mV 最小关断时间 Tmin_OFF 2 uSec 最大关断时间 Tmax_OFF 3 mSec 最大线缆补偿电流 ICable_max 40 uA 电流检测部分(CS管脚) CS前沿消隐时间 T-blanking 500 nSec 芯片关断延迟 TD_OC CL=1nF at GATE 100 nSec 恒流控制部分(CC管脚) 内部CC基准电压 V_CC_ref 490 500 510 mV

间隙点云配准不确定性调查...
残骸重建和一般紧固件装配过程。在一项关于航空工业点云配准的研究中,孙等[6,7]利用三维点云和测量技术开发了一套拼接飞机残骸的系统。结果表明,其粗配准精度为0.6毫米,可接受的配准精度为0.2毫米。王等[8]提出了一种用于飞机点云配准的通用密度不变框架。结果表明,与其他研究[9-11]相比,他们的方法具有更好的精度(0.6毫米——1.0毫米),以均方根误差(RMSE)评估。虽然精度有所提高,但所提出的方法适用于整个扫描飞机,而不是特定的部件。徐等[12]提出了一种紧固件装配的配准方法,其中利用局部几何特征和迭代最近点(ICP)算法。该配准方法用于扫描数据和 CAD 模型之间。结果表明,与单独使用 ICP 算法相比,所提出的方法具有更好的效率。但是,所提出的注册方法的不确定性并未披露。

移动机器人点云配准算法综述
本综述的主题是机器人中的几何配准。配准算法将数据集关联到一个公共坐标系中。它们已广泛应用于物体重建、检查、医疗应用和移动机器人定位。我们专注于需要配准点云的移动机器人应用。虽然这些算法的基本原理很简单,但已经针对许多不同的应用提出了许多变体。在这篇综述中,我们从历史的角度介绍了配准问题,并表明可以根据一些元素来组织和区分大量的解决方案。因此,我们提出了几何配准的形式化,并将文献中提出的算法投射到该框架中。最后,我们回顾了该框架在移动机器人中的一些应用,这些应用涵盖了不同类型的平台、环境和任务。这些示例使我们能够研究每个用例的具体要求以及导致配准实施的必要配置选择。最终,本评论的目的是为几何配准配置的选择提供指导。

多传感器 – 多目标 – 仅方位传感器配准
纯方位估计是目标跟踪中的基本问题之一,也是具有挑战性的问题。与雷达跟踪的情况一样,偏移或位置偏差的存在会加剧纯方位估计的挑战。对各种传感器偏差进行建模并非易事,文献中专门针对纯方位跟踪的研究并不多。本文讨论了纯方位传感器中偏移偏差的建模以及随后的带偏差补偿的多目标跟踪。偏差估计在融合节点处处理,各个传感器以关联测量报告 (AMR) 或纯角度轨迹的形式向该节点报告其本地轨迹。该建模基于多传感器方法,可以有效处理监视区域中随时间变化的目标数量。所提出的算法可得出最大似然偏差估计器。还推导出相应的 Cram´er-Rao 下限,以量化所提出的方法或任何其他算法可以实现的理论精度。最后,给出了不同分布式跟踪场景的模拟结果,以证明所提出方法的能力。为了证明所提出的方法即使在出现误报和漏检的情况下也能发挥作用,还给出了集中式跟踪场景的模拟结果,其中本地传感器发送所有测量值(而不是 AMR 或本地轨道)。

机载多光谱图像序列的自动配准和镶嵌
摘要 机载遥感由于系统部署的灵活性而在农业监测中具有重要的应用。实际应用中的主要障碍是其高成本。为了降低成本,可以使用小型空中平台(例如微型无人机(mini-UAV))上的单个相机来组装多光谱系统。在这种情况下,即使经过仔细调整,相机仍可能存在移位和旋转错位。平台飞行时会捕获连续的帧。因此,在生成任何商业产品以支持实际决策之前,必须进行单帧内的多波段配准和帧间镶嵌以获得整个监测区域的联合配准多光谱图像。在本文中,我们提出了实现此目标的自动算法。这些算法对于没有明显特征的图像场景特别有用。自动和手动评估均证实了所开发的算法在整体平坦地形无明显特征的多传感器数据融合中的有效性。

基于单精度浮点非迭代粗到精配准...
摘要。可变形图像配准是医学图像分析中的关键步骤,用于找到一对固定图像和运动图像之间的非线性空间变换。基于卷积神经网络 (CNN) 的深度配准方法已被广泛使用,因为它们可以快速、端到端地执行图像配准。然而,这些方法通常对具有较大变形的图像对性能有限。最近,迭代深度配准方法已被用来缓解这一限制,其中变换以由粗到细的方式迭代学习。然而,迭代方法不可避免地延长了配准运行时间,并且倾向于在每次迭代中学习单独的图像特征,这阻碍了利用这些特征来促进以后的迭代配准。在本研究中,我们提出了一种用于可变形图像配准的非迭代由粗到细配准网络 (NICE-Net)。在 NICE-Net 中,我们提出了:(i) 单次深度累积学习 (SDCL) 解码器,可以在网络的单次(迭代)中累积学习从粗到细的转换;(ii) 选择性传播特征学习 (SFL) 编码器,可以学习整个从粗到细配准过程的常见图像特征并根据需要选择性传播这些特征。在 3D 脑磁共振成像 (MRI) 的六个公共数据集上进行的大量实验表明,我们提出的 NICE-Net 可以胜过最先进的迭代深度配准方法,而只需要与非迭代方法类似的运行时间。