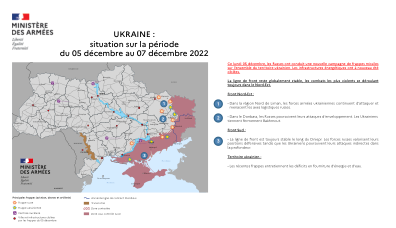
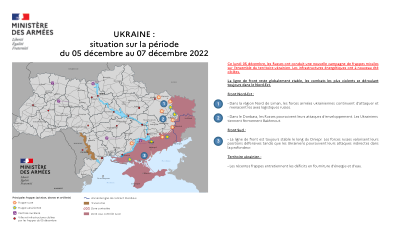
XiaoMi-AI文件搜索系统
World File Search System间接攻击
靶向癌症治疗 - AAFP
癌症靶向治疗包括对各种癌症进行基因生物标记物检测,这些标记物可以预测对直接或间接攻击生物标记物的化疗药物的反应。1,2 在过去十年中,美国食品药品管理局 (FDA) 批准了大约 40 种针对 12 种不同癌症的新型靶向疗法 3-6(表 1)。尽管有这些创新,但有资格接受此类治疗的癌症患者比例仍然很小。2018 年,在 610,000 名晚期或转移性癌症患者中,估计只有 8.3% 有资格接受靶向治疗。7 从这些药物中受益的患者数量甚至更少,而且范围很广,取决于肿瘤和药物。靶向肿瘤治疗主要在转移性(无法治愈)癌症中显示出益处,在局部或区域环境中接受手术治疗的患者很少能成功。
通过LIDAR引起的自主驾驶中的欺骗
抽象的轨迹预测基于其历史轨迹附近的动作。准确的轨迹预测(或简而言之)对于自动驾驶汽车(AVS)至关重要。现有的攻击通过直接操纵攻击者AV的历史轨迹来损害受害者AV的预测模型,该攻击者的历史轨迹有限。本文首次探讨了一种间接攻击方法,该方法通过对受害者AV的感知模块的攻击引起预测错误。尽管已经证明,通过将一些对象放置在战略位置,对基于激光雷达的感知的物理可实现的攻击是可能的,但是从广阔的搜索空间中找到一个对象位置,以便为了在不同的受害者AV速度下对预测进行有效的预测,这仍然是一个开放的挑战。通过分析,我们观察到一个预测模型容易出现在场景中的一个点上的攻击。顺便说一句,我们提出了一个新颖的两阶段攻击框架来实现单点攻击。预测侧攻击的第一阶段有效地识别出在基于对象的攻击下对概念的检测结果的分布,这是对预测模型的状态扰动,这些模型有效且对速度不敏感。在匹配的第二阶段,我们将可行的对象位置与发现的状态扰动匹配。我们使用公共自主驾驶数据集进行评估表明,我们的攻击率最高63%,受害者AV的各种危险响应。我们攻击的有效性也在真实的测试台车上策划。据我们所知,这项研究是从基于激光雷达的感知到自主驾驶预测的首次安全分析,从而导致对预测的现实攻击。 为了抵消拟议的攻击,讨论了潜在的防御措施。据我们所知,这项研究是从基于激光雷达的感知到自主驾驶预测的首次安全分析,从而导致对预测的现实攻击。为了抵消拟议的攻击,讨论了潜在的防御措施。