XiaoMi-AI文件搜索系统
World File Search System阶后

文章 使用有限元方法研究 PDMS 材料制成的微柱片的压缩行为 Thitikan Pakawan 1,a , Tumrong Puttapituk
2 泰国微电子中心 (TMEC)、国家电子和计算机技术中心 (NECTEC),Chachoengsao 24000,泰国 电子邮件:a thitikan.work@gmail.com,b fengtop@ku.ac.th(通讯作者),c nithi.atthi@nectec.or.th 摘要。泰国微电子中心采用软光刻技术和卷对卷工艺制造微柱片,用作海洋结构和医疗设备上的超疏水和超疏油表面涂层。本研究旨在使用 ANSYS Mechanical APDL 程序研究两种基底厚度分别为 1,910 µm 和 150 µm 的 PDMS 微柱片在压缩载荷下的适当本构模型和力学行为。本构模型包括 Mooney-Rivlin(2、3 和 5 个参数)、Ogden(1 阶、2 阶和 3 阶)、Neo-Hookean、多项式(1 阶和 2 阶)、Arruda-Boyce、Gent 和 Yeoh(1 阶、2 阶和 3 阶)模型,并与单轴压缩试验的实验数据进行曲线拟合。我们发现,对于低应变范围 (0.225)z,最准确的本构模型是 Mooney-Rivlin 5 参数模型。抗压强度和侧向破坏

已发布版本的引用 (APA):Alilou, M., Azami, H., Oshnoei, A., Mohammadi-ivatloo, B., & Teodorescu, R. (2023)。分数阶控制技术
摘要:为了应对日益严重的能源危机和温室气体排放,全球能源革命加速了需求侧可管理能源系统的利用,例如风力涡轮机、光伏板、电动汽车和储能系统。可再生能源单元和储能系统的控制系统对其性能有很大影响,并且绝对影响整个电网的效率。经典控制器基于整数阶微分和积分,而分数阶控制器具有改变阶数以更好地建模和控制系统的巨大潜力。本文对可再生能源单元和储能设备的能源系统进行了全面的回顾。对各种论文进行了评估,并介绍了它们的方法和结果。此外,还提到了分数阶方法的数学基础,并根据不同的参数对各种研究进行了分类。还使用其数学公式解释了分数阶微积分的各种定义。不同的研究和数值评估表明,分数阶技术在估计、控制和改善各种运行条件下的能源系统性能方面具有适当的效率和准确性,因此分数阶方法的平均误差明显低于其他方法。

分数薛定谔方程中双曲双阱势的量子信息熵
摘要:在本研究中,我们研究了双曲双阱势 (HDWP) 的分数阶薛定谔方程 (FSE) 中的位置和动量香农熵,分别表示为 S x 和 S p 。我们在分析中探索了用 k 表示的分数阶导数的各种值。我们的研究结果揭示了有关低位态的位置熵密度 ρ s ( x ) 和动量熵密度 ρ s ( p ) 的局部化特性的有趣行为。具体而言,随着分数阶导数 k 的减小,ρ s ( x ) 变得更加局部化,而 ρ s ( p ) 变得更加非局部化。此外,我们观察到随着导数 k 的减小,位置熵 S x 减小,而动量熵 S p 增加。特别地,这些熵的总和随着分数阶导数 k 的减小而持续增加。值得注意的是,尽管随着 HDWP 深度 u 的增加,位置 Shannon 熵 S x 增加,动量 Shannon 熵 S p 减少,但 Beckner–Bialynicki-Birula–Mycielski (BBM) 不等式关系仍然成立。此外,我们研究了 Fisher 熵及其对 HDWP 深度 u 和分数阶导数 k 的依赖关系。结果表明,Fisher 熵随着 HDWP 深度 u 的增加和分数阶导数 k 的减小而增加。

适合太阳能频率控制的控制器......
摘要 本文讨论了分数阶 PDF-(1+PI) 控制器在孤立微电网中频率调节的应用,该控制器由 coot 优化算法调整。微电网由生物柴油发电机、生物质热电联产、ORC 太阳能热电厂、微型水力涡轮发电机和风力涡轮发电机组成。此外,还考虑了电池存储和燃料电池。这项工作致力于提出一种有效的方案,该方案可以作为社区或农场的模型,通过生物能源最大限度地减少浪费,并有效地在发电和需求之间实现同步,同时最大限度地减少频率偏差。针对各种实际场景测试了所提出的控制器。结果表明,分数阶 PDF-(1+PI) 表现出比 PIDF 和整数阶 PDF-(1+PI) 控制器更好的瞬态响应。关键词 1 分数阶 PDF-(1+PI) 控制器、基于生物能源的发电机、负载频率控制、微电网、coot 优化算法

基于超扭转分数阶滑模控制的最优模型预测调节直流微电网直流侧电压
摘要:本文旨在从本质上调节电力系统扰动条件下直流微电网的直流母线电压。因此,提出了一种新型最优模型预测超扭转分数阶滑模控制 (OMP-STFOSMC),用于三相交流-直流转换器,可有效提高微电网的稳定性和动态性能。传统的模型预测控制器严重影响动态稳定性,导致过冲、下冲和稳定时间过长。可以用滑模控制器代替这些传统控制器,以适当解决此问题。传统滑模控制器的主要缺点是控制信号中的高频抖动,这会影响系统,并且使其在实际应用中不令人满意且不可行。所提出的 OMP-STFOSMC 可以有效提高控制跟踪性能并减少高频抖动问题。随机分形搜索 (SFS) 算法因其高探索性和良好的局部最优规避能力而被用于最佳地调整控制器参数。考虑不同的运行条件来评估所提出的控制器的动态和无抖动性能。通过比较分析的仿真结果,可以观察到所提出的OMP-STFOSMC具有更好的动态稳定性特性。关键词:直流微电网,跟踪性能,抖动问题,OMP-STFOSMC,SFS算法

分数网络神经系统 - NSF PAR
在过去的 20 年里,神经技术取得了长足的进步。然而,我们距离实现这些技术的商业化还有很长的路要走,因为我们缺乏一个统一的框架来研究将硬件、软件和神经系统结合在一起的网络神经系统 (CNS)。动态系统在开发这些技术方面发挥着关键作用,因为它们可以捕捉大脑的不同方面并深入了解它们的功能。越来越多的证据表明,分数阶动态系统在神经系统建模方面具有优势,因为它们具有紧凑的表示形式和捕捉神经行为中表现出的长程记忆的准确性。在这篇简短的综述中,我们概述了分数阶 CNS,其中包括 CNS 背景下的分数阶系统。特别是,我们介绍了分析和综合分数阶 CNS 所需的基本定义,包括系统识别、状态估计和闭环控制。此外,我们还提供了一些 CNS 背景下的应用的说明,并提出了一些未来可能的研究方向。这三个领域的进步对于开发下一代 CNS 至关重要,最终将改善人们的生活质量。

并网光伏系统三相逆变器基于无源性的黎曼刘维尔分数阶滑模控制
由于环境条件多变,光伏 (PV) 系统参数始终是非线性的。在多种不确定性、干扰和时变随机条件的发生下,最大功率点跟踪 (MPPT) 很困难。因此,本研究提出了基于被动性的分数阶滑模控制器 (PBSMC),以检查和开发 PV 功率和直流电压误差跟踪的存储功能。提出了一种独特的分数阶滑模控制 (FOSMC) 框架的滑动面,并通过实施 Lyapunov 稳定性方法证明了其稳定性和有限时间收敛性。还在被动系统中添加了额外的滑模控制 (SMC) 输入,通过消除快速不确定性和干扰来提高控制器性能。因此,PBSMC 以及在不同操作条件下的全局一致控制效率是通过增强的系统阻尼和相当大的鲁棒性来实现的。所提技术的新颖之处在于基于黎曼刘维尔 (RL) 分数阶微积分的 FOSMC 框架的独特滑动曲面。结果表明,与分数阶比例积分微分 (FOPID) 控制器相比,所提控制技术可在可变辐照度条件下将 PV 输出功率的跟踪误差降低 81%。与基于被动性的控制 (PBC) 相比,该误差降低 39%,与基于被动性的 FOPID (EPBFOPID) 相比,该误差降低 28%。所提技术可使电网侧电压和电流的总谐波失真最小。在不同太阳辐照度下,PBSMC 中 PV 输出功率的跟踪时间为 0.025 秒,但 FOPID、PBC 和 EPBFOPID 未能完全收敛。同样,直流链路电压在 0.05 秒内跟踪了参考电压,但其余方法要么无法收敛,要么在相当长的时间后才收敛。在太阳辐射和温度变化期间,使用 PBSMC,光伏输出功率在 0.018 秒内收敛,但其余方法未能收敛或完全跟踪,与其他方法相比,由于 PBSMC,直流链路电压的跟踪误差最小。此外,光伏输出功率在 0.1 秒内收敛到参考功率
气候变化、气候政策与经济增长
3 此关系可从单方程能量平衡模型中推导出来。在离散时间中,能量平衡模型为 Δ T t = - λT t -1 + bRF t ,其中 T t 为温度,RF t 为辐射强迫,t 以年为单位,b 为单位调整。这可解得 T t = b (1 – (1- λ )L) -1 RF t = ( b /λ) F t + c *(L)Δ RF t ,其中 c *(L) 是 Beveridge-Nelson 分解的可求和残差滞后多项式。如果 RF t 可以很好地近似为 1 阶积分,则此质量平衡方程意味着 T t 和 RF t 是 (1,1) 阶协整的,协整系数为 b / λ 。如果 RF t 是持续性的但不一定是 1 阶协整的,那么 T t 将继承 RF t 的持续性,并与 RF t 共享共同的长期趋势。在这里,我们遵循 Kaufmann、Kauppi 和 Stock (2006) 的观点,采用 1 阶协整模型。有关此处概述的能量平衡模型推导的更多信息,请参阅 Kaufmann 等人 (2013) 和 Pretis (2019)。
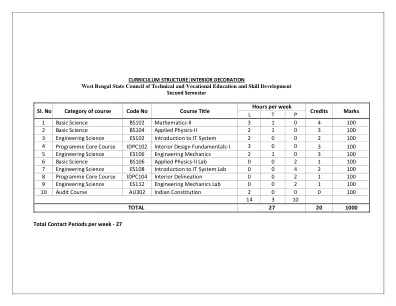
数学-II 课程大纲
先决条件:掌握基本的坐标几何、统计学和微积分知识 总接触时长:60 小时 目的:数学是工程专业学生的支柱。数学课程根据工程部门的需求不断变化。教学大纲的设计考虑到了各类学生的新兴需求。课程非常重视各种内容的应用。本课程将培养学生进行精确计算的分析能力,并为学生提供继续教育的基础。 课程目标:完成本课程后,学生将能够 i) 应用克莱姆法则和矩阵求逆的知识来寻找线性联立方程的解。ii) 应用直线、圆、圆锥曲线方程解决实际问题。iii) 应用各种积分评估技术和各种寻找一阶和二阶常微分方程的完全原函数的方法来解决工程问题。iv) 使用偏微分的概念来解决物理问题。 v) 分析实际情况下的统计数据和概率。 单元 1 行列式和矩阵 10 小时 1.1 行列式:4 1.1.1 2 阶和 3 阶行列式的定义和展开。子式和余因式 1.1.2 行列式的基本性质(仅限陈述)和简单问题 1.1.3 4 阶行列式的 Chios 方法 1.1.4 用 Cramer 规则解线性联立方程(最多 3 个未知数)。 1.2 矩阵: 1.2.1 矩阵的定义及其阶。 6 1.2.2 不同类型的矩阵。(矩形、方阵、行矩阵、列矩阵、上三角矩阵、下三角矩阵、对角矩阵、标量矩阵、单位矩阵、零矩阵) 1.2.3 两个矩阵相等 1.2.4 矩阵与标量的加法、减法、乘法以及两个矩阵的乘法 1.2.5 矩阵的转置、对称矩阵和斜对称矩阵、简单问题 1.2.6 奇异矩阵和非奇异矩阵、3 阶矩阵的伴随矩阵和逆矩阵