XiaoMi-AI文件搜索系统
World File Search System阻焊层

柔性基板上薄硅片的倒装芯片组装
减薄硅芯片在柔性基板上的倒装芯片组装 Tan Zhang、Zhenwei Hou 和 R. Wayne Johnson 奥本大学 阿拉巴马州奥本 Alina Moussessian 和 Linda Del Castillo 喷气推进实验室 加利福尼亚州帕萨迪纳 Charles Banda 物理科学实验室 摘要 将减薄硅芯片(25-100 µ m)组装到柔性基板上为从智能卡到太空雷达等各种应用提供了超薄柔性电子产品的选择。对于高密度应用,可以通过堆叠和层压预组装和测试的柔性层然后处理垂直互连来制造 3-D 模块。本文介绍了将减薄芯片倒装芯片组装到聚酰亚胺和液晶聚合物 (LCP) 柔性基板上的工艺。已经开发出两种用于聚酰亚胺和 LCP 柔性基板的组装方法。在第一种方法中,将焊料凸块芯片回流焊接到图案化柔性基板上。需要使用夹具在回流期间保持柔性基板平整。回流之后是底部填充分配和固化。底部填充分配工艺对于避免底部填充流到薄硅片顶部至关重要,我们将在下文中讨论这一工艺。在第二种方法中,通孔通过聚酰亚胺或 LCP 蚀刻,露出接触垫的底面。将焊膏挤入通孔,回流并清洗,在通孔中形成焊料“凸块”。对浸焊产生的具有低轮廓焊料凸块的芯片进行焊剂处理、放置和回流。然后对芯片进行底部填充。这种方法可降低总组装厚度。简介为了满足单芯片和堆叠芯片封装中不断降低的轮廓要求,正在开发薄芯片的组装工艺。1-4 柔性基板(25-50 µ m)提供了一种进一步减小封装厚度的方法。减薄的 Si-on-flex 结构也有利于太空应用。减薄的 Si 虽然易碎,但也很灵活。减薄的 Si-on-flex 可以卷成管状进行发射,并在太空中展开,从而形成带有集成电子设备的大面积天线。组装减薄的 Si-on-flex 必须解决的问题包括:基板设计和制造、减薄后的凸块、芯片处理、回流期间的基板平整度和底部填充分配。这些将在以下章节中讨论。基板本工作中使用了两种柔性基板材料:聚酰亚胺和液晶聚合物 (LCP)。LCP 特性包括 100GHz 下的良好介电性能、低吸湿性和极低的透湿性。5-13 LCP 的热膨胀系数 (CTE) 可以在 LCP 薄膜的双轴挤出过程中控制。市售薄膜的 CTE 为 8 和 17ppm/o C。在本工作中使用 8ppm/o C LCP 薄膜。在用于倒装芯片组装的传统柔性基板设计中,铜芯片连接点的图案化位置与芯片组装位置在柔性薄膜的同一侧(图 1)。阻焊层用于定义可焊焊盘区域(顶面设计)。另一种方法是蚀刻聚酰亚胺或 LCP 通孔,露出铜焊盘的底面(背面设计)。通孔通过激光钻孔或反应离子蚀刻 (RIE) 制成。倒装芯片从铜图案的对面组装(图 2),从而无需阻焊层并减小了总厚度。这种方法的另一个优点(低轮廓凸块)将在后面介绍。顶面聚酰亚胺基板由约翰霍普金斯大学应用物理实验室制造,而激光钻孔背面 LCP 设计由 STS ATL 公司制造。背面 (RIE) LCP 和聚酰亚胺基板由奥本大学制造。只需一层金属即可布线菊花链芯片互连图案。

3D 打印聚乳酸的压阻特性 (...
摘要:人们对 3D 打印在传感器制造中的应用越来越感兴趣。使用 3D 打印技术为制造几何和功能复杂的传感器提供了一种新方法。这项工作介绍了对 3D 打印热塑性纳米复合材料在施加力下的压缩的分析。获得了相应电阻变化与施加负载的响应,以评估打印层作为压力/力传感器的有效性。聚乳酸 (PLA) 基质中的多壁碳纳米管 (MWNT) 和高结构炭黑 (Ketjenblack) (KB) 被挤出以开发可 3D 打印的细丝。研究了创建的 3D 打印层的电和压阻行为。MWNT 和 KB 3D 打印层的渗透阈值分别为 1 wt.% 和 4 wt.%。厚度为 1 mm 的 PLA/1 wt.% MWNT 3D 打印层表现出负压系数 (NPC),其特征是,当压缩载荷增加至 18 N 且最大应变高达约 16% 时,电阻会下降约一个数量级。在力速率为 1 N/min 的循环模式下,PLA/1 wt.% MWNT 3D 打印层表现出良好的性能,压阻系数或应变系数 (G) 为 7.6,压阻响应幅度 (A r) 约为 -0.8。KB 复合材料在循环模式下无法显示稳定的压阻响应。然而,在高力率压缩下,PLA/4 wt.% KB 3D 打印层导致大灵敏度的响应(Ar=-0.90)并且在第一个循环中不受噪声影响,具有 G = 47.6 的高值,这是一种高效的压阻行为。
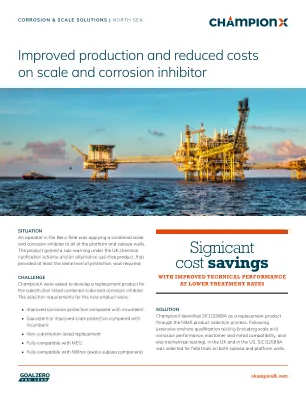
提高产量并降低阻垢缓蚀剂成本
本文件按“原样”提供,不提供任何形式的担保。ChampionX 不提供任何明示或暗示的担保,包括但不限于适销性、特定用途的适用性或任何用途的适用性、所有权和非侵权性的暗示担保。虽然在编写本文件时已采取合理的谨慎措施,但 ChampionX 不声明或保证本文件的内容准确、完整、可靠、最新或无错误。

使真正的忆阻内存处理更快且......
摘要 — 忆阻技术是替代传统内存技术的有吸引力的候选技术,并且还可以使用一种称为“状态逻辑”的技术来执行逻辑和算术运算。将数据存储和计算结合在内存阵列中可以实现一种新颖的非冯·诺依曼架构,其中两种操作都在忆阻内存处理单元 (mMPU) 中执行。mMPU 依赖于在不改变基本内存阵列结构的情况下向忆阻内存单元添加计算能力。使用 mMPU 可以缓解冯·诺依曼机器对性能和能耗的主要限制,即 CPU 和内存之间的数据传输。这里讨论了 mMPU 的各个方面,包括其架构和对计算系统和软件的影响,以及检查微架构方面。我们展示了如何改进 mMPU 以加速不同的应用程序,以及如何在 mMPU 操作中改进忆阻器的可靠性差的问题。
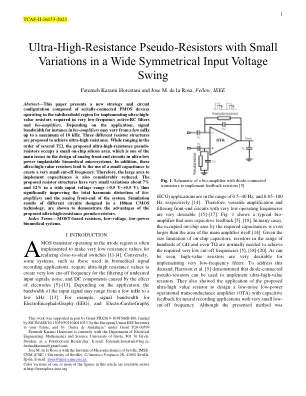
具有小尺寸的超高阻伪电阻...
摘要 —本文介绍了一种由工作在亚阈值区域的串联 PMOS 器件组成的新策略和电路配置,用于实现极低频有源 RC 滤波器和生物放大器所需的超高值电阻器。根据应用不同,例如生物放大器中的信号带宽可能从几 mHz 到最高 10 kHz 不等。提出了三种不同的电阻结构来实现超高阻值。虽然提出的超高阻值伪电阻器的阻值在几 T Ω 的数量级,但它们占用的片上硅片面积很小,这是超低功耗可植入生物医学微系统中模拟前端电路设计的主要问题之一。此外,这些超高阻值电阻器导致使用小电容来产生非常小的截止频率。因此,实现电容所需的大面积也大大减少。所提出的电阻结构在宽输入电压范围(-0.5 V~+0.5 V)内变化很小,约为7%和12%,从而显著改善了生物放大器的总谐波失真和系统的模拟前端。在180nm CMOS工艺中设计的不同电路的仿真结果证明了所提出的超高阻值伪电阻的优势。

流水线式忆阻神经网络模数转换器
摘要——随着高速、高精度、低功耗混合信号系统的出现,对精确、快速、节能的模数转换器 (ADC) 和数模转换器 (DAC) 的需求日益增长。不幸的是,随着 CMOS 技术的缩小,现代 ADC 在速度、功率和精度之间进行权衡。最近,已经提出了四位 ADC/DAC 的忆阻神经形态架构。可以使用机器学习算法实时训练此类转换器,以突破速度-功率-精度权衡,同时优化不同应用的转换性能。然而,将此类架构扩展到四位以上具有挑战性。本文提出了一种基于四位转换器流水线的可扩展模块化神经网络 ADC 架构,保留了其在应用重新配置、失配自校准、噪声容忍和功率优化方面的固有优势,同时以延迟为代价接近更高的分辨率和吞吐量。 SPICE 评估表明,8 位流水线 ADC 可实现 0.18 LSB INL、0.20 LSB DNL、7.6 ENOB 和 0.97 fJ/conv FOM。这项工作朝着实现大规模神经形态数据转换器迈出了重要一步。

LED 组装中的低空洞焊膏
摘要 目的——本文旨在研究在批量生产环境下使用七种低空洞无铅焊膏通过回流焊接组装的发光二极管 (LED) 的导热垫下焊点的空洞现象。设计/方法/方法——所研究的焊膏为 SAC305 型、Innolot 型或由制造商在 (SnAgCu) 合金基础上特别配制,并添加了一些合金元素,例如 Bi、In、Sb 和 Ti,以提供低空洞含量。使用 SnPb 焊膏 - OM5100 - 作为基准。由于行业实践中通常使用 LED 焊盘的焊膏覆盖率作为焊点中空洞含量的衡量标准。发现 – 发现使用 LMPA-Q 和 REL61 焊膏形成的焊点具有最高的覆盖率,且空洞含量最低,其特征是覆盖率平均值分别为 93.13% [标准差 (SD) = 2.72%] 和 92.93% (SD = 2.77%)。空洞直径达到平均值,LMPA-Q 为 0.061 毫米 (SD = 0.044 毫米),REL61 为 0.074 毫米 (SD = 0.052 毫米)。结果以直方图、绘图框和 X 射线图像的形式呈现。使用 3D 计算机断层扫描观察了一些选定的焊点。原创性/价值 – 使用 Origin 软件基于 2D X 射线图像进行统计分析。它们可以比较制造商推荐的低空洞的各种焊膏的特性。该结果可能对焊膏制造商或电子制造服务有用。

TsanKit:用于焊球枕头缺陷检测的人工智能
摘要 本文提出了一种针对焊球HIP(Head-In-Pillow)缺陷检测的AI(人工智能)解决方案。HIP缺陷会影响焊球的导电性,导致间歇性故障。由于HIP缺陷的位置和形状多变,传统的机器视觉算法无法完全解决该问题。近年来,卷积神经网络(CNN)在图像识别和分类方面表现优异,但由于数据不足,容易引起过拟合问题。因此,我们结合CNN和机器学习算法支持向量机(SVM)来设计我们的检测流程。参考几种最新模型的优点,我们提出了3D CNN模型,并采用焦点损失和三重态损失来解决由稀有缺陷数据引起的数据不平衡问题。与几种经典的CNN模型和深度学习检测软件SuaKIT相比,我们的检测方法具有最佳性能和快速的测试速度。

硅压阻式压力传感器迟滞补偿
摘要:本文旨在研究补偿硅压力传感器的迟滞误差,以提高传感器精度。研究对象是基于MEMS技术的工业领域中的大量程扩散硅压阻式压力传感器。由于传感器的迟滞特性复杂,补偿困难,目前尚未见相关研究的先例。作者分析了迟滞特性的成因和影响因素,并通过实验证明了硅压力传感器满足广义Preisach模型的必要和充分条件。利用传感器的Preisach模型,采用逆广义Preisach模型的补偿算法对迟滞误差进行补偿,实验表明,补偿后迟滞误差明显减小,从而提高了传感器的精度。