XiaoMi-AI文件搜索系统
World File Search System陀螺仪
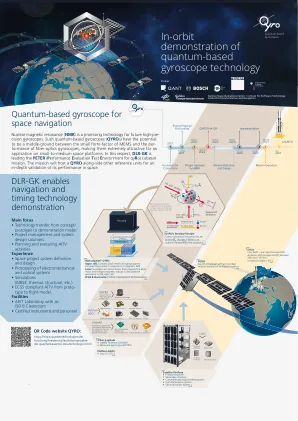
量子陀螺仪技术在轨演示
核磁共振 ( NMR ) 是未来高精度陀螺仪的一项有前途的技术。这种基于量子的陀螺仪 ( QYRO ) 有可能成为 MEMS 的小尺寸和光纤陀螺仪性能之间的中间地带,使其在中小型太空平台上的应用极具吸引力。在这方面,DLR-GK 正在领导 PETER(qy R o 性能评估测试环境)立方体卫星任务。该任务将与其他参考单元一起搭载 QYRO,以深入验证其在太空中的性能。

突破太空陀螺仪已知性能的界限
本文件及其所含的所有信息均为空客的独有财产。交付本文件或披露其内容并不授予任何知识产权。未经空客书面同意,不得复制或向第三方披露本文件。本文件及其内容不得用于除提供目的以外的任何目的。空客、其徽标和产品名称均为注册商标。

陀螺仪机械和电子相位漂移调查,分辨率为 2 μrad/√Hz
在当前的集成电路实现中,无法实时测量 Δ𝜙 𝐷𝑆,但如果最初校准了误差 Δ𝜙 𝐷𝑆 (𝑇),则可以实现其在线温度补偿。虽然很少有作品介绍过这个问题 [2-4],但它们都没有 (i) 设想出专用的装置来测量漂移 Δ𝜙 𝐷𝑆 (𝑇) ,(ii) 确定了此类测量的关键噪声贡献,以及 (iii) 通过实验从电子耦合漂移中分离出由模式分裂和品质因数的温度变化引起的机械漂移。这项工作完成了所有这些任务,使用图 1a 所示的三轴单驱动陀螺仪的俯仰轴作为测试设备。该设备的频率在 20 kHz 范围内,间隔约 500 Hz,驱动和感应品质因数分别在 7000 和 700 范围内 [5]。

利用光纤陀螺仪研究钢筋混凝土框架结构的旋转运动
本文讨论了旋转运动对建筑物的影响问题,并介绍了一种名为“用于旋转事件和现象监测的光纤旋转地震仪”的土木工程应用。它专为长期建筑物监测和结构旋转记录而设计。它基于萨格纳克效应,能够直接检测单轴旋转运动,无需任何参考系统。它能够检测信号幅度范围从 10 -8 rad/s 到 10 rad/s 以及频率从 DC 到 1000 Hz 的旋转分量。本文提供的数据显示了不同楼层的钢筋混凝土框架结构的行为。通过将应用的传感器放置在建筑物的不同楼层,进行了多次测量。实验室和现场测量证实,用于旋转事件和现象监测的光纤系统是一种准确且适合土木工程应用的设备。

基于脑机接口的无人机控制,利用头部运动的陀螺仪数据
摘要 本研究探索了利用人体头部运动的陀螺仪数据通过脑机接口 (BCI) 控制 DJI Tello 四轴飞行器的可能性。在本研究中,收集了 4 名佩戴 Emotiv Epoc X 耳机的志愿者之间的 100 多个陀螺仪记录,这些记录捕捉了 X、Y 和 Z 列(正式称为 GyroX、GyroY、GyroZ)。Emotiv Epoc X 数据捕捉了与 DJI Tello 四轴飞行器导航相关的每个参与者的头部运动(左、右、静止和向前)。数据经过彻底的处理和分析,使用 Microsoft Excel 在图表中显示出独特的模式。然后开发了一种 Python 条件算法来解释陀螺仪数据,以确定每个头部运动方向,此外还使用来自 Tello SDK 2.0 用户指南库的 Tello 无人机命令。通过集成 Python Lab Streaming Layer (LSL) 实现 Emotiv Epoc X 和 Tello 四轴飞行器之间的持续数据交换,实现了实时控制。实验结果证实,通过陀螺仪数据和头部运动成功控制 Tello 四轴飞行器,运行准确率为 98%,展示了该技术在无人机控制方面的潜力。

G-2000 陀螺仪惯性产品系列 - 诺斯罗普·格鲁曼
©2021 Northrop Grumman 保留所有权利 DS-548-JDK-0521 已获准公开发布;分发不受限制;#21-0863;日期为 2021 年 6 月 3 日 美国国防部 (DoD) 视觉信息的出现并不意味着或构成国防部的认可。
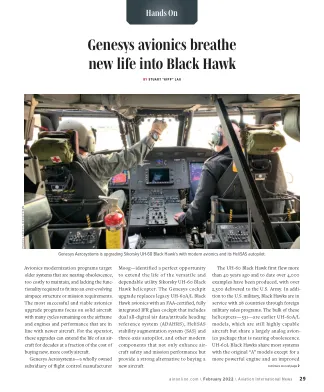
Genesys 航空电子设备为 Black Hawk 注入新活力
变速箱以提高起重能力。许多 UH-60A 已转换为 L 标准。除了军事用途外,许多早期的黑鹰直升机还开始作为民用消防飞机或通用飞机重获新生。传统黑鹰直升机的核心问题是机械陀螺仪;每架飞机都配备了一组机电或光纤陀螺仪。这些陀螺仪是航空电子系统的主要部件之一,容易出现故障,维护成本高昂。美国陆军已宣布这些陀螺仪已过时,并于 2020 年 8 月发布通知,要求强制更换这些旧系统。除了这些陀螺仪,早期的黑鹰直升机还配备了大量模拟飞行仪表、无线电、信号显示器和其他可追溯到 20 世纪 80 年代初的组件。除了完整的航空电子设备现代化计划外,Genesys 还为老式黑鹰直升机提供了模块化解决方案。对于预算有限的用户,机械陀螺仪可以用可以“驱动”老式飞行仪表的双数字 ADAHRS 替换。

非线性多谐振量子光子陀螺仪中 Fisher 信息的贝叶斯优化
摘要:我们提出了一种基于非线性多谐振光学器件的片上陀螺仪,该器件位于薄膜𝜒 (2) 谐振器中,同时兼具高灵敏度、紧凑外形和低功耗。我们从理论上分析了一种新颖的整体度量标准——多谐振非线性光子腔的 Fisher 信息容量,以充分表征我们的陀螺仪在基本量子噪声条件下的灵敏度。利用贝叶斯优化技术,我们直接最大化非线性多谐振 Fisher 信息。我们的整体优化方法协调了多种物理现象的和谐融合——包括噪声压缩、非线性波混频、非线性临界耦合和非惯性信号——所有这些都封装在单个传感器谐振器中,从而显著提高了灵敏度。我们表明,与具有相同占地面积、内在品质因数和功率预算的散粒噪声受限线性陀螺仪相比,可以实现约 470 × 的改进。
微电动机械系统的设计四边形陀螺仪,具有合规机械放大
摘要:在这项工作中,提出了一种新型的MEMS振动陀螺仪的机械放大结构,目的是提高其灵敏度。该方案是使用微机械V形弹簧系统实现的,作为挠度放大机制。首先证明了该机制的有效性,用于电容式完全脱钩的四元陀螺仪。概念证明垂直轴机械放大的陀螺仪,已设计,模拟和制造365%的放大系数,并在本文中介绍了评估的结果。实验结果表明,陀螺仪的固有频率为11.67 kHz,全尺度测量范围为±400° /s,最大非线性为54.69 ppm。偏置稳定性为44.53° /h。实验结果表明,这种四边形陀螺仪的性能是将来达到导航等级的一种非常潜在的新方法。

对空间应用的MEMS陀螺仪的热效量稳定性
在过去的二十年中,MEMS陀螺仪广泛用于消费电子产品,汽车安全性,机器人技术和稳定,这是由于其尺寸较小和功耗低[1,2]。随着性能的提高,它们也具有巨大的潜力,可以启用更高级的应用程序,例如空间应用。出于这个原因,MEMS陀螺仪有望在大型卫星中检测到故障检测,或者在微卫星,电信卫星和行星流浪者中进行态度传播和速率确定[3-5]。尽管如此,尽管其性能提高,但MEMS陀螺仪仍需要主要的技术适应性适合空间应用,尤其是相对于航空航天环境的高阻力特征。许多研究工作已专门用于MEMS可靠性的领域。通常,大多数特定空间的可靠性问题是热循环和热冲击,辐射,振动和机械冲击,在发射和阶段 /隔热罩分离时[6-9]。微卫星的寿命主要是一年。一方面,陀螺仪必须具有最佳的成本,尺寸,重量和功率(CSWAP)。另一方面,陀螺仪在卫星使用寿命期间应稳定起作用。由于其成本优势,大气包装的MEMS陀螺仪是最好的候选者之一。然而,空间环境的高真空是带有大气包装的MEMS陀螺仪无法忽略的因素。陀螺仪包装中的气压将在非常高的真空状态下的一段时间内下降。MEMS陀螺仪的偏置漂移与工作压力有关[10]。MEMS陀螺仪的另一个偏见漂移来源是它们对温度变化的固有敏感性[11]。因此,工程师应充分注意陀螺仪对热效环境的敏感性。