XiaoMi-AI文件搜索系统
World File Search System陡峭的
评估放松汽车管制的价值...
平均而言,市场通过将销售从燃油效率较低的车型转移到燃油效率较高的车型并提高每种车型的燃油效率,来遵守更严格的 GHG 标准。合规性可以用等量图(图 3)表示,该图表示只有两种新车的程式化市场。横轴测量销售的高排放汽车数量,纵轴测量销售的低排放汽车数量。沿着从原点开始的一条射线,市场实现了相同的平均排放量和燃油经济性性能,例如 40 mpg,因为这两种类型的车辆以相同的比例出售。因此,40 mpg 的 GHG/CAFE 标准要求市场销售沿着或高于相应射线。收紧 GHG 标准要求市场转向代表更少排放量(更高燃油效率)的更陡峭的射线。
Microsoft Word - 关于资源充足性每日实施和年度展示的最终报告.docx
2022 年 6 月,委员会批准了 D.22-06-050,该提案确定南加州爱迪生公司 (SCE) 的 24 小时 SOD 提案(以 PG&E 的原始 SOD 提案为基础)最符合 D.21-07-014 的原则和目标。6 根据 24 小时 SOD 框架,每个负荷服务实体 (LSE) 必须证明有足够的容量来满足其特定的总负荷曲线,包括计划储备裕度 (PRM),在加州独立系统运营商 (CAISO) 当月“最差一天”的所有 24 小时内。委员会在 D.22-06-050 中将“最差一天”定义为当月包含最高同步峰值负荷预测的小时的那一天,同时它承认,如果发现另一个属性(例如,最陡峭的爬坡要求)比同步峰值对可靠性更具挑战性,则该定义可能会随着时间的推移而发生变化。7

基于失真的验证定向能量沉积添加剂制造零件的热处理模拟
定向的能量沉积添加剂制造零件具有陡峭的应力梯度,并且由快速热循环引起的各向异性微观结构和上层层制造,因此可以使用热处理来减少残留应力并恢复微观结构。数值模拟是确定热处理过程参数并减少必要的应用程序的合适工具。热处理模拟在此过程中计算失真和残余应力。验证实验对于验证仿真结果是必要的。本文提出了添加剂组件的热处理的3D耦合热机械模型。使用C形状样品几何形状进行基于失真的验证以验证模拟结果。Therefore, the C-ring samples were 3D scanned using a structured light 3D scanner to compare the distortion of the samples with different post- processing histories.

diter ++:多户户外环境中多机射击导航的各种地形和多模式数据集
摘要 - 多个现场机器人的协作对于大规模环境的导航和映射是必需的。在穿越时,考虑到每个机器人性质的遍历性估算对于确保机器人的安全并确保其性能至关重要。即使在结构化的环境中,不考虑地形信息的行驶也可能导致平台严重损坏,例如由于陡峭的斜坡或由于突然的高度变化而导致的下降。为了应对这一挑战,我们提出了Diter ++,多机器人,多主题和多模式数据集,包括地面信息。使用向前的RGB摄像头和面向接地的RGB-D相机,热相机,两种类型的激光镜头,IMU,GPS和机器人运动传感器获得数据集。数据集和补充材料可在https://sites.google.com/view/diter-plusplus/上找到。

咨询树木师 /项目经理 - 西雅图< / div>
条件评分以及其他注释,例如结构缺陷,害虫和疾病问题以及基础设施冲突的存在。现场工作可以包括与现场的客户会面,并与他们讨论树木状况,生物学,生态学和景观维护实践。现场工作将是单独的,或者是团队的一部分,具体取决于工作和现场条件的范围。现场工作可以包括城市街道树,住宅院子,校园,森林/未开发的物业和活跃的建筑工地。地点从小城市地段到多英亩的包裹,可能具有陡峭的山坡,湿地等。现场访问和树木检查可以包括攀岩或地面支撑以进行空中检查。现场工作发生在正常天气中的白天数小时,包括大雨和风。●可交付物:在现场收集的数据的处理,包括Excel电子表格,地图和
AR910.pdf - 国防部
1.2 印度的地形多样,从白雪皑皑、山峰高度超过 28,000 英尺的喜马拉雅山到沙漠、茂密的丛林和广阔的平原。北部的锡亚琴冰川是世界上最高的战场,哨所高达 21,000 英尺。印度西部边境穿过沙漠、肥沃的平原和森林茂密的山脉。东北部边境也包括陡峭的高山和茂密的热带森林。南部有濒临大海的山脉、点缀着河谷的内陆高原、沿海平原和遥远的岛屿领土,例如西边的拉克沙群岛和东边的安达曼和尼科巴群岛。从古吉拉特邦到西孟加拉邦,印度三面与阿拉伯海、印度洋和孟加拉湾接壤。安达曼和尼科巴群岛距我国东海岸最近点 1300 公里,具有战略意义
自然特征
“从奈伊海滩向南到亚奎纳湾,海岸线正受到风暴波的侵蚀。考虑在这些悬崖上建造建筑物的人应该意识到,悬崖每年都会向后侵蚀一英尺,如果发生山体滑坡,侵蚀可能会更加严重。在陡峭的植被斜坡上建造堤坝的做法极其危险,因为植被会分解,在堤坝和原始地面的交界处产生滑坡。 “纽波特海岸线以东,从奈伊海滩向南到海湾,海洋阶地上覆盖着松散的沙丘沙。这些沙子在被植被覆盖的地方是稳定的;然而,在植被被移除或没有植被的地方,沙子就会受到侵蚀或被风吹走。在大风期间,经常可以看到沙子飘过街道,飘进街道附近的房屋。 _________________________________________________________________

“区域条件决定了低碳室内农业的食物-能源-土地关系”
用于可再生能源发电的潜在土地可用性一直是许多研究的主题,这些研究的假设大相径庭。尽管他们一致认为不包括保护用途和湿地,但对草地、灌木丛和植被稀疏的土地等相关土地覆盖类别的估计值从非常低 3,4 到几乎 100% 5,6 不等。造成这种情况的主要原因是雄心程度不同,从当前的政治可行性 3 到假设或技术上可实现 5 。一般而言,陆上风能和太阳能光伏之间的土地可用性不同,与太阳能光伏相比,陆上风能更适合森林 7 ,而在陡峭的地区 8,9 或更高的海拔 3,5 也有可能。另一方面,城市地区(主要是屋顶)被认为部分可用于太阳能光伏,据报道其潜力约占城市土地总量的 1-15% 6,10,11 。
钻石中无序的偶极自旋合奏中的准浮力细胞化
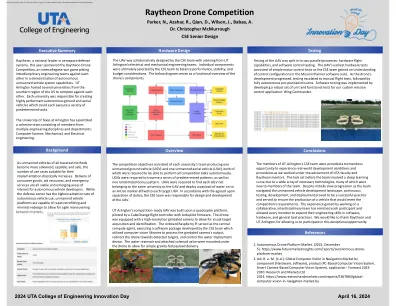
在UTA教职员工和雷神导师的建议下,UT-Arlington CSE团队的成员提供了一个巨大的机会,可以体验现实世界中的发展条件和程序。由于各种各样的必要技术,团队面前的任务涉及陡峭的学习曲线,其中许多是团队成员的新手。最初随着团队驾驶无人汽车开发景观,持续测试,开发和部署的发展,尽管进展缓慢,但事实证明是一种成功的做法,并有助于确保生产满足竞争对手要求的车辆。通过协作,跨学科团队的工作经验丰富了每个参与者,并允许每个成员在软件,硬件和一般最佳实践中扩展其工程技能。我们要感谢雷神公司和乌特 - 阿灵顿允许我们参加这个非凡的机会。

激光束稳定系统“紧凑”
•转向镜和检测器之间的光距离:对于较大距离的精度较高。因此,应选择较大的距离。第一个转向镜应靠近波动源。•光束直径:具有相同的激光束位置的绝对变化,较小的直径会导致4 QD象限的功率差异更强,因此会导致更陡峭的控制信号。这就是为什么直径较小的激光束可以以较高的精度定位。•强度:检测器的分辨率进一步取决于击中敏感区域的强度。这可以通过适当的光学过滤器选择和电子方式进行优化(另请参见第5.5节)来改变。•重复率和脉冲持续时间:可以针对不同的激光参数优化控制器带宽。较高的带宽导致更快的反应,因此在快速波动的情况下,精度更高。