XiaoMi-AI文件搜索系统
World File Search System雷达回波
基于导航雷达回波视频数据的占据栅格地图构建方法
摘 要 : [ 目的 ] 为解决无人艇的船载导航雷达对养殖区 、 浮筒 、 小型漂浮物等海洋漂浮障碍物感知效果不 佳的问题 , 提出一种基于导航雷达回波视频数据构建与更新的占据栅格地图的环境感知方法。 [ 方法 ] 首 先 , 采用多级集合的形式描述雷达点迹与回波点间的包含关系 , 为栅格地图构建奠定基础 , 期间 , 基于群相邻 关系对近邻点迹进行凝聚 , 抑制目标分裂导致的航迹偏差 ; 然后 , 利用所提的基于自然对数函数的占据栅格 地图概率更新算法 , 通过合理利用历史数据区分海杂波与微小海洋漂浮障碍物 ; 最后 , 建立基于点迹属性的 栅格地图概率扩散模型 , 以较好地保证典型动态目标占据栅格更新的实时性。 [ 结果 ] 实船试验结果表明 , 所提方法可准确获取养殖区 、 浮筒等成片海洋漂浮障碍物的轮廓信息 , 抑制目标分裂现象 ; 与经典方法相比 , 所提方法对干舷 0.5 m 的小型漂浮物首次发现距离提升了 78.34 m , 定位精度提升了 1.42 m 。 [ 结论 ] 所提方 法能够实现对多种海洋漂浮障碍物 、 海面运动目标的准确感知 , 确保无人艇航行安全。

亚历山德拉-伊奥娜·阿尔布
出版物: • Gabriela Czibula、Andrei Mihai、Alexandra-Ioana Albu、Istvan-Gergely Czibula、Sorin Burcea、Abdelkader Mezghani,AutoNowP:一种基于天气雷达反射率预测的深度自动编码器降水预报方法。数学,机器学习计算优化特刊,2021 年,9(14):1653,https://doi.org/10.3390/math9141653 • Alexandra-Ioana Albu、Gabriela Czibula、Andrei Mihai、Istvan-Gergely Czibula、Sorin Burcea、Abdelkader Mezghani。NeXtNow:一种用于预测天气雷达数据以进行预报的卷积深度学习模型。遥感,2022,14(16):3890,https://doi.org/10.3390/rs14163890 • Alexandra-Ioana Albu。使用基于自动编码器的感知损失改进雷达回波外推模型。第 27 届基于知识和智能信息与工程系统国际会议 2023,已接受。

2783.pdf
简介:美国国家射电天文台 (NRAO)、格林班克天文台 (GBO) 和雷神情报与空间公司 (RIS) 正在为格林班克望远镜 (GBT) 设计一种高功率的下一代行星雷达系统,称为 ngRADAR。作为一个试点项目,RIS 设计的低功率 Ku 波段发射器(13.9 GHz 时输出功率高达 700 W)被集成到 GBO 的 100 米 GBT 上,并使用 NRAO 的十个 25 米甚长基线阵列 (VLBA) 天线接收雷达回波。这些观测生成了有史以来收集到的月球选定位置的最高分辨率地面合成孔径雷达 (SAR) 图像,能够对已报废卫星(太空碎片)的大小和自旋状态进行表征,并探测到距离地球 210 万公里(约 5.5 个月球距离)的潜在危险近地小行星 [1, 2]。在这里,我们重点关注月球雷达图像。
Sum07_将 Avian 雷达整合到海军行动中
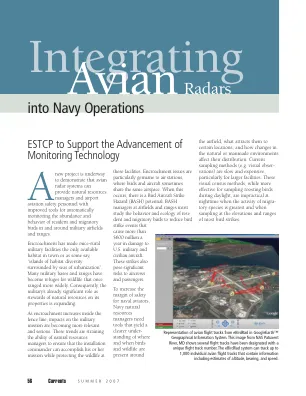
2000 财政年度,美国国防部 (DoD) 遗产计划办公室为南卡罗来纳州克莱姆森大学雷达鸟类学实验室 (CUROL) 提供了资金,以开发一种能够探测机场鸟类的鸟类雷达系统,从而减少鸟击的发生。最初的 BirdRad 系统旨在成为一种廉价的移动式鸟类雷达。它包括一个低成本的商用海事雷达,配备 4 度波束宽度抛物面天线(以获得更好的高度分辨率)和一台台式个人计算机,用于在图形文件中显示和捕获雷达图像。CUROL 建造了五个 BirdRad 系统,部署在三个海军、一个海军陆战队和一个空军基地。虽然 BirdRad 在探测零到六海里范围内的鸟类方面非常有效,但它有几个局限性。主要是来自静止物体(“地面杂波”)的雷达回波会遮挡移动目标;从屏幕截图中提取目标轨迹太慢并且需要大量劳动力,无法追踪许多种类的鸟类;并且很难将屏幕上的目标与周围的景观联系起来。

多波段无源雷达演示器 - NATO STO
与传统的有源雷达系统相比,无源雷达系统利用外部环境中存在的大量射频发射信号,具有许多优势。这些优势包括通过使用第三方传输作为目标照明源,节省采购和运营成本,从而降低功率要求和隐蔽性。此类系统可用于军事监视以及民用应用,例如空域监视和地面监测。通常,此类系统使用通信、无线电或电视广播服务产生的射频发射。每个发射器在覆盖范围、功率水平和波形方面都有自己的特点。继使用电视传输进行前向散射雷达研究之后,BAE 系统先进技术中心设计并建造了一个用于无源传感器研究的演示系统。演示系统在多倍频程带宽上运行,可以配置为利用广播和通信系统的模拟和数字传输。这最大限度地提高了灵活性,并允许通过利用基于特定几何形状、覆盖范围、波形和目标特征的最佳雷达回波进行监视和跟踪。特别是,使用不同几何形状在不同波段进行多次观测将允许轨迹融合,从而实现比单波段系统更稳健、更准确的轨迹。本文概述了在演示器开发过程中解决的系统和设计问题,包括模拟模型、目标特征和与不同类型传输相关的权衡。显示了实验工作的结果,说明了演示系统对机会目标的运行情况。
多波段无源雷达演示器 - NATO STO
无源雷达系统利用外部环境中存在的大量射频发射信号,与传统的有源雷达系统相比具有许多优势。这些优势包括,通过使用这些第三方传输作为目标照明源,可以节省采购和运营成本,从而降低功率要求和隐蔽性。此类系统可用于军事监视以及民用应用,例如空域监视和地面监视。通常,此类系统使用通信、无线电或电视广播服务产生的射频发射。每个发射器在覆盖范围、功率水平和波形方面都有自己的特点。继使用电视传输进行前向散射雷达研究之后,BAE 系统先进技术中心设计并建造了一个用于无源传感器研究的演示系统。演示系统在多倍频程带宽上运行,可以配置为利用来自广播和通信系统的模拟和数字传输。这最大限度地提高了灵活性,并允许通过利用基于特定几何形状、覆盖范围、波形和目标特征的最佳雷达回波来进行监视和跟踪。具体而言,使用不同几何形状在不同波段进行多次观测将允许轨迹融合,从而实现比单波段系统更稳健、更准确的轨迹。本文概述了在演示器开发过程中解决的系统和设计问题,包括模拟模型、目标特征和与不同类型传输相关的权衡。本文展示了实验工作的结果,说明了演示器系统对机会目标的运行情况。

地球围栏:非机密深空雷达能力的全球扩展
我们描述了 ThothX (thothx.com) 的新型深空雷达技术 Earthfence 的全球扩张。Earthfence 是一种软件定义的脉冲压缩雷达技术,使大口径天线的操作员能够将其重新用于 GEO 单基地雷达。Earthfence 最初由 ThothX 位于渥太华附近的 46 米抛物面天线开发,目前已部署在该天线上,这是加拿大最大的全可控天线,可观测范围达一亿米的驻留空间物体,并提供近乎实时的米级范围精度,具有业界领先的延迟、节奏和自动化。该解决方案在 C 波段运行,完全数字化,雷达回波脉冲在低噪声放大后以复杂正交形式数字化,并转发给超级计算机集群进行分析,该超级计算机集群应用了包括脉冲解压缩在内的雷达处理算法。该系统无需人工干预即可将结果实时传输到包括统一数据库在内的存储库,ThothX 定期在 Sprint 高级概念训练 (SACT) 活动期间提供对 GEO 航天器的雷达观测数据,这是太空部队和商务部的一项联合举措。与传统雷达相比,Earthfence 采用新颖的硬件技术和非常低的放大器功率水平,几乎无法被观察目标探测到,因此它具有固有的抗干扰性。Earthfence 的高精度结果仅依赖于对氢原子钟频率标准的校准。
热带降雨测量任务 (TRMM) 降水...
TRMM降水雷达(PR)是第一台星载降雨雷达,也是TRMM上唯一能够直接观测降雨垂直分布的仪器。TRMM PR的频率为13.8 GHz。PR可以实现陆地和海洋的定量降雨估计。PR还可以提供降雨高度信息,这对基于辐射计的降雨率反演算法很有用。PR的覆盖范围足够小,可以研究不均匀降雨对低频微波辐射计通道相对粗糙覆盖范围的影响。PR的主要设计和性能参数如表0-2所示[Kozu等,2001]。PR的观测几何如图0-1所示。在正常观测模式下,PR 天线波束在 ±17 的横向轨道方向上扫描,结果从一端到另一端的扫描宽度为 220 公里。PR 的天线波束宽度为 0.71 ,在 ±17 的扫描角度内有 49 个观测角度箱。当 TRMM 处于 350 公里的标称高度时,水平分辨率(覆盖区大小)在天底为 4.3 公里,在扫描边缘约为 5 公里。TRMM PR 的距离分辨率为 250 米,等于天底的垂直分辨率。对于每个观测角度箱,雷达回波采样是在海面和 15 公里高度之间的距离门上进行的。对于天底入射,还收集了高达 5 公里高度的“镜像”。此外,还部分收集了表面回波(扫描角度在 ±9.94 以内)和降雨回波(扫描角度在 ±3.55 以内,高达 7.5 公里)的“过采样”回波数据。这些过采样数据将用于精确测量表面回波水平和融化层结构。根据发射前地面测试和轨道测试确定,最小可检测 Z(对应于噪声等效接收功率)从 23.3 dBZ(基于规范要求)提高到 20.8 dBZ。这主要是由于发射功率增加和接收器噪声系数降低。
论文 - DTIC
图 1.雷达的电磁频谱使用情况(来自 [3])........................................................2 图 2.距离模糊的发生(来自 [3])......................................................................4 图 3.雷达回波([9] 之后).........................................................................................9 图 4.脉冲中的无线电波形(来自 [3]).........................................................................10 图 5.信号强度与目标范围(来自 [3]) ................................................................11 图 6。零到零和 3dB 波束宽度(来自 [3]) ..............................................................13 图 7。天线孔径尺寸(来自 [3]) ......................................................................14 图 8。线性阵列的零到零波束宽度(来自 [3]) .............................................................14 图 9。锥形照明(来自 [3]) .............................................................................15 图 10。大气衰减([11] 之后) .............................................................................16 图 11。波的压缩(来自 [3]) .............................................................................18 图 12。相对地面和机载平台的运动(来自 [3])......................................................................19 图 13。多普勒雷达的类型(来自 [4]).............................................................................20 图 14。消除模糊返回(来自 [3]).............................................................................24 图 15。视距(来自 [3]).........................................................................................25 图 16。PRF Vs.距离(来自 [3]).........................................................................................26 图 17。速度模糊([16] 之后).............................................................................27 图 18。最大。明确多普勒,λ =1 cm(来自 [3])..............................................27 图 19。最大值。明确多普勒,λ =3 cm(来自 [3])..............................................28 图 20。最大值。明确多普勒,λ =10 cm(来自 [3])..............................................28 图 21。具有最大值的不同 PRF 类别。目标范围(来自 [3])........................................30 图 22。由于高 PRF 而形成的无杂波区域(来自 [3]).............................................32 图 23。明确范围与高 PRF 模式下的旁瓣回波(来自 [3]) ......................................................................32 图 24。AN/APG-70(来自 [20]) ......................................................................................34 图 25。AN/APG-68(来自 [22]) ......................................................................................35 图 26。AN/APG-73(来自 [24]) ......................................................................................35 图 27。明确速度(来自 [4]) .............................................................................37 图 28。距离剖面(来自 [3]) .............................................................................................38 图 29。多普勒剖面(来自 [3]) .............................................................................................39 图 30。移除 MLC 后的距离剖面(来自 [3])................................................................39 图 31。八分之三波形([3] 之后)..............................................................40 图 32。使用 3:8 的目标检测(来自 [3]).........................................................................41 图 33。GMT 抑制(来自 [3]).........................................................................................42 图 34。近距离旁瓣杂波(来自 [3]).........................................................................42 图 35。理想模糊函数([15] 之后).........................................................................45 图 36。相干脉冲串,N=5(来自 [25]).........................................................................46 图 37。相干脉冲串的模糊轮廓图................................................47 图 38。PRF= 30 kHz N=15 脉冲占空比= 0.2..............................................48 图 39。PRF= 10 kHz N=15 脉冲占空比= 0.2..............................................48 图 40。PRF= 30 和 10 kHz 的轮廓比较 .............................................................49 图 41。PRF= 30 和 10 kHz 的椭圆比较 .............................................................49 图 42。模糊图,N=15 脉冲,PRF= 30 kHz .............................................................53