机构名称:
¥ 1.0
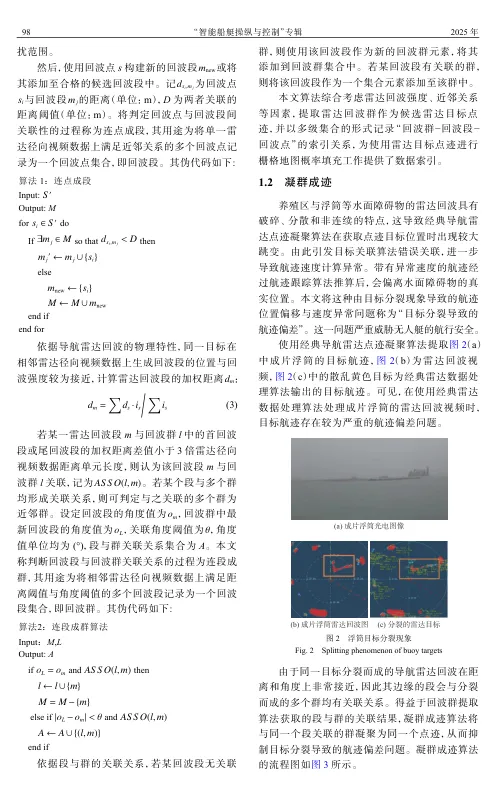
摘 要 : [ 目的 ] 为解决无人艇的船载导航雷达对养殖区 、 浮筒 、 小型漂浮物等海洋漂浮障碍物感知效果不 佳的问题 , 提出一种基于导航雷达回波视频数据构建与更新的占据栅格地图的环境感知方法。 [ 方法 ] 首 先 , 采用多级集合的形式描述雷达点迹与回波点间的包含关系 , 为栅格地图构建奠定基础 , 期间 , 基于群相邻 关系对近邻点迹进行凝聚 , 抑制目标分裂导致的航迹偏差 ; 然后 , 利用所提的基于自然对数函数的占据栅格 地图概率更新算法 , 通过合理利用历史数据区分海杂波与微小海洋漂浮障碍物 ; 最后 , 建立基于点迹属性的 栅格地图概率扩散模型 , 以较好地保证典型动态目标占据栅格更新的实时性。 [ 结果 ] 实船试验结果表明 , 所提方法可准确获取养殖区 、 浮筒等成片海洋漂浮障碍物的轮廓信息 , 抑制目标分裂现象 ; 与经典方法相比 , 所提方法对干舷 0.5 m 的小型漂浮物首次发现距离提升了 78.34 m , 定位精度提升了 1.42 m 。 [ 结论 ] 所提方 法能够实现对多种海洋漂浮障碍物 、 海面运动目标的准确感知 , 确保无人艇航行安全。
基于导航雷达回波视频数据的占据栅格地图构建方法
主要关键词


相关文件推荐