XiaoMi-AI文件搜索系统
World File Search System颤动


分配程序:客观评估经纪
摘要:这项工作提出了一种移动应用模型,以自动化客观评估的校正,该系统将确定学生的答案并将其与教师先前注册的正确答案进行比较。该提案的目的是为改善手动填充答案表的绩效和实用性做出贡献。该系统是使用编程语言颤动(DART)和Python开发的。部分结果显示了对答案表的准确校正和所获得的总点的计算。但是,当前的限制是需要手动定义问题的数量及其各自的值。这些详细信息可以使用图像处理资源获取。本研究强调了本应用程序可用的大量技术资源,但建议进一步研究以取得更有效的结果。关键字:图像处理,计算机视觉,自动评估校正

穆罕默德·哈蒂菲·本·曼索尔 - ftkma ump
智能主动力控制应用于精密机器 MH Mansor,MH Ramli,M Ishak 全国机械工程研究和研究生会议...... 铣床静态模态分析的实验研究 N Jamil,AR Yusoff,MH Mansor 先进材料研究 903,123-128 铣床静态模态测试的响应预测 N Jamil,AR Yusoff,MH Mansor 应用力学与材料 606,131-135 电磁能量收集器的参数研究 MF Hassan,AR Yusoff,MH Mansor,MTC Kar 应用力学与材料 471,113-118 铣刀几何形状的多目标优化以抑制颤动并提高生产率 AR Yusoff,MF Hassan,MH Mansor 先进材料研究 445,21-26 使用 MIG 焊接对不同厚度的异种板材金属进行模态分析 MM Hatifi、MH Firdaus 和 AY Razlan DOI:http://dx.doi.org/10.15282/ijame.9.2013.21.0143
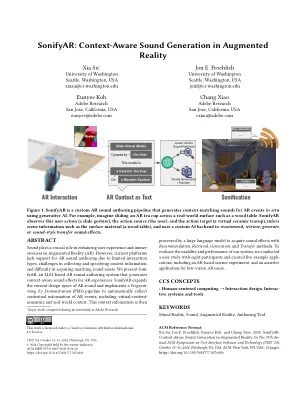
Sonifyar:增强现实中的上下文感知声音
(1)有限的现实世界上下文。现有系统通常支持链接到AR中虚拟对象的动作触发器,但缺乏对现实世界上下文信息的支持(例如,,一种虚拟玩具机器人,穿越木材,地毯或玻璃等多样化的室内表面。(2)有限的交互规范。现有系统仅提供预定义的交互触发器,例如“ TAP”和“接口输入”。这限制了创建者在提供的选项之外指定交互的能力,尤其是涉及环境环境的选项(例如,用户在现实世界中“幻灯片”虚拟粉笔在现实世界黑板上滑动)。(3)有限的声音来源。现有系统受其图书馆中可用的声音资产的限制以及在线合适的声音资源的稀缺性。因此,AR的作者努力为不同的AR事件找到适当的声音(例如,复制虚拟蜻蜓的翅膀颤动或模拟虚拟恐龙的饮食声音)。

基于动态操作的DC微电网的强大非线性控制考虑可再生能量整合
摘要:微电网的重要性已被直接电流(DC)微电网的研究量增加所承认。主要原因是简单的结构和有效的性能。在这篇研究文章中,已经提出了双积分滑动模式控制器(DIMC)用于涉及可再生能源和混合储能系统(HESS)的能源收集和直流微电网管理。DIMC比传统的滑动模式控制器提供了更好的动态响应和减少的颤动。在第一阶段,得出了网格的状态差异模型。然后,为PV系统和混合储能系统提出了非线性控制定律,以实现DC链路上电压调节的主要目标。在后面的部分中,使用Lyapunov稳定性标准证明了系统的渐近稳定性。最后,提供了能源管理算法,以确保DC微电网在安全操作限制内的平稳运行。通过在MATLAB/SIMULINK软件上实现并与滑动模式控制和Lyapunov重新设计进行比较,通过在MATLAB/SIMULINK软件上实现了拟议的系统的有效性。此外,为了确保所提出的控制器对该方案的实际生存能力,已在实时硬件式测试工作台上进行了测试。

颤音属的定量分析。以及菲律宾邦板牙的Minalin的罗非鱼长大池塘的环境质量评估1 Michelle Grace
摘要。一般而言,弧菌是众所周知的病原体,导致水产养殖行业的高鱼死亡率和经济损失。这种细菌属在水生环境中普遍存在。当环境参数不在适当的范围之外,导致鱼类的压力与颤动的病原体(如Vibrio spp)的攻击时,在水生环境中发生细菌疾病爆发。在先前的研究中,这种细菌菌群引起了罗非鱼的疾病并记录了死亡率。因此,本研究量化了假定的颤音属。在尼罗河罗非鱼(Oreochromis niloticus)和在邦板牙Minalin的长大土池塘中获得的环境样品。大多数环境水质参数都在水产养殖的推荐水平之内,除了盐度,SECCHI椎间盘可见性,总溶解固体,电导率和沉积物pH。观察到的推定弧菌属的患病率。在鱼类和水样中均为100%,而沉积物样品中只有65%。进一步的分析表明,从10 8 CFU G -1的沉积物中获得了最高计数。推定弧菌属。鱼类和水中的数量范围为10 6至10 7 CFU G -1

以过程控制为中心的制造研究
1) Y. Kakinuma 等人:使用 La 掺杂 CeO 2 浆料对光学玻璃镜片进行超精密磨削,CIRP Annals,68,1 (2019) 345-348。2) S. Fujii 等人:全精密加工制造超高 Q 值晶体光学微谐振器,Optica,7,6 (2020) 694-701。3) T. Kuriya 等人:Inconel 718 定向能量沉积的凝固时间和孔隙率之间的关系先进制造技术特刊,JAMDSM,12,5 (2018) JAMDSM0104。4) M. Ueda 等人:用于快速制造的 DED(定向能量沉积)的智能工艺规划和控制,JAMDSM,14, 1 (2020) JAMSDSM0015。5) S. Sakata 等人:通过基于观察者的切削力估算避免不等齿距角平行车削中的颤动,制造科学与工程杂志 140,4 (2018) 044501。6) S. Kato 等人:利用新结构材料的节能机床的热位移和节能性能评估,日本机械工程师学会期刊,(2020 年)。 doi.org/10. 1299/transjsme.20-00002 7) K. Itoh 等人:通过 EHD 图案化开发电粘附微柱阵列,智能材料和结构,28(2019)034003。

(Jurnal Ilmiah Perikanan Dan Kelautan)
虾水产养殖面临H 2 S生产和诸如颤音属的细菌病原体的环境挑战。和Desulfovibrio spp ..这可以产生有害化合物,例如H 2 S,并为V纤维细菌提供繁殖地,从而在虾中引起疾病。抗生素通常用于治疗这些疾病,但它们可能导致抗药性和污染。因此,使用噬菌体作为治疗选择是一种更可持续的方法。这项研究隔离和评估了能够选择性抑制这些细菌的噬菌体,证明了它们作为可持续生物控制剂的潜力,可以改善水质并减少对抗生素的依赖。细菌,并使用斑块和扩散方法分离噬菌体。这项研究分离了desulfovibrio fulgaris菌株(12D),并鉴定出能够抑制虾类水产养殖系统中颤动的溶血性的噬菌体。通过改变补充噬菌体的处理中的大小,形状和菌落数,可以鉴定出可以抑制deulfovibrio ufgaris和V. parahaeyticus细菌的三种潜在噬菌体菌株。尽管它们不改变这些细菌的遗传序列,但它们有效地控制了其人群。在三个噬菌体谱系中,ɸTT2H是抑制desulfovibrio dulgaris最有效的。这项研究证明了在虾培养中使用噬菌体来控制细菌种群的潜力。

纵向飞行动力学建模和稳定性... - eucass
可折叠机翼扑翼飞行器(FWA)是一种通过模仿昆虫、鸟类或蝙蝠等折叠机翼上下扇动来产生升力和推力的飞行器。近年来,仿生扑翼飞行器的研究日益增多,提出了多种结构形式的扑翼飞行器。扑翼飞行器的飞行环境与鸟类或大型昆虫相似,如低雷诺数的流体动力学和非定常气动[1,2] 。扑翼飞行器在飞行过程中,其运动学模型通常具有颤动、摆动、扭转和伸展4个自由度[3] 。Thielicke [4] 研究了不同弯度和厚度的鸟类臂翼和手翼在慢速飞行过程中的气动特性。仿生飞行器传统运动学模型仅考虑了颤振和扭转两个自由度。本文在传统飞行器运动学模型的基础上,增加了平面内折叠和非平面折叠两个自由度。本文四自由度运动学模型的气动建模方法是拟常数模型与考虑洗流效应的单元理论相结合。采用多刚体有限元法建立纵向动力学模型。采用Floquet-Lyapunov方法分析开环纵向稳定性。采用鲁棒变增益控制方法分析闭环纵向稳定性。

通过病原体识别和炎症调节参与先天免疫的Litopenaeus Vannamei的甘露糖受体
摘要:作为C型凝集素超家族成员的甘露糖受体是一种非典型的pat-tern识别受体,可以内化与病原体相关的配体并激活细胞内信号传导。在这里,甘露糖受体基因LVMR是从Paci -Paci -files flitopenaeus vannamei中鉴定出来的。LVMR编码了信号肽,纤维蛋白II型(FN II)结构域和两个具有特殊EPS和FND基序的碳水化合物识别域(CRD)。LVMR转录本主要在肝癌中检测到,并在病原体挑战后提出了时间依赖的反应。重组LVMR(RLVMR)可以以Ca 2+依赖性的方式与各种PAMP和凝集的微生物结合,具有强大结合D-甘露糖和N-乙酰糖的能力。LVMR的敲低增强了大多数NF-κB途径基因的表达,炎症和氧化还原基因,而对大多数吞噬作用基因的转录没有明显影响。此外,LVMR的敲低导致活性氧(ROS)含量(ROS)含量和诱导型一氧化氮合酶(INOS)活性在颤动性和溶血感染后的肝癌中的活性增加。所有这些结果表明,LVMR在细菌感染过程中可能会作为免疫识别和炎症的负调节剂作为PRR。