XiaoMi-AI文件搜索系统
World File Search System飞机位置
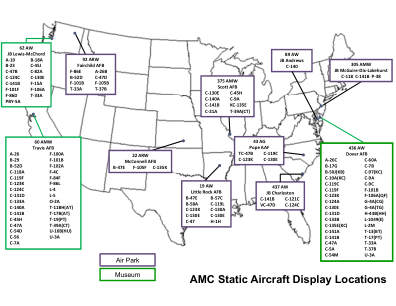
AMC 静态展示飞机位置
436 AW 多佛空军基地 A-26C C-60A B-17G C-7B B-50J(KB) C-97(KC) C-10A(KC) C-9A C-119C C-9C C-119F F-101B C-123K F-106A(QF) C-124A G-4A(CG) C-130E G-4A(TG) C-131D H-43B(HH) C-133B L-1049(E) C-135E(KC) L-2M C-141A T-13(BT) C-141B T-17(PT) C-47A T-33A C-5A T-37B C-54M U-3A
空中客车实施飞行跟踪、自主...
为满足要求和目标,ConOps 指定了所需的高级功能,并描述了所有空域、所有飞行阶段(正常和遇险飞行条件)中飞机位置信息的用户和用途,包括及时准确地确定飞机事故现场的位置以及恢复飞行数据。

航空电子设备 - Garmin
可选 Chartview™:通过 Garmin 的 ChartView™ 选项(需要订阅)启用 Jeppesen® 进近图的电子显示。可以在 GMX 200 显示屏上查看仪表进近和机场地面图,同时飞机位置会叠加。根据飞行计划,GMX 200 将自动加载目的地机场的进场图。还提供标准仪表进场和离场程序 (STAR 和 DP)。

Cirrus-Perspective-Plus.pdf
渐进式警报。您是否正在接近正确的跑道?您知道剩余距离吗?那是正确的滑行道吗?当飞机进入并穿过机场环境时,动态增强您在空中和地面的态势感知。文字建议不断更新飞机位置,青色 V 形标记突出显示正确的跑道。最重要的是,“跑道太短”或“检查跑道”等紧急警报为不正确的位置提供了额外的提示。

MAVPro:使用最少数量的地面传感器进行航空安全 ADS-B 消息验证
自 2020 年以来,广播式自动相关监视 (ADS-B) 在美国和欧洲的飞机交通管制中发挥着重要作用。ADS-B 消息包含有关飞机位置和轨迹的信息,以便更好地实时跟踪太空中的飞机。然而,缺乏安全机制将成为信任 ADS-B 技术的障碍。因此,应结合对策来确保通信安全并评估收到消息的完整性和可信度。在本文中,我们设计了一种名为 MAVPro 的消息验证协议,以评估收到的 ADS-B 消息的可信度,否则其真实性和完整性无法验证。MAVPro 背后的主要思想是将收到的 ADS-B 消息中的位置声明与预期的飞机位置进行比较,后者是使用预测轨迹信息(例如速度、经过时间、飞机加速度、航向信息)和一组预先信任的、持续更新的锚点计算得出的。如果只有一个 ADS-B 接收器收到消息,我们的协议就能够评估收到消息的可信度——而使用基于多点定位的技术验证位置声明则需要四个接收器。因此,与现有解决方案相比,我们能够大大扩展可以应用安全检查的覆盖范围。我们根据来自 OpenSky 网络的实时数据评估 MAVPro,分析其性能并验证其适用性
Jetstream 41 常规数据 - 希腊群岛
客户支持 区域飞机位置 全球机队 调度可靠性 维护途径 维护计划 机身维护 - MACRO 发动机维护 备件物流 结构维修协议 现场服务代表 客户培训 运营支持 供应商支持 技术支持 性能 性能特性 Jetstream 41 • 基础数据 • 起飞性能 • 有效载荷范围 货机 货机有效载荷 经济 经济分析 Jetstream 41 • 经济效益

国际飞机任务规划系统 (IAMPS) - Leidos
ff 支持在 2D/3D 视图中进行任务演练,通过真实的飞行预览显示地图上的位置,并从飞行员的角度在 3D 合成环境中描绘飞机 ff 审查从 IAMPS 任务计划应用程序导入的计划任务,以协调任务程序和目标行动 ff 通过记录的航空电子数据流中的深入、明确细节进行行动后审查,以在最佳回忆间隔内提供关键反馈 ff 将记录的飞机位置、驾驶舱视频和飞行音频与从 IAMPS 任务计划应用程序导入的规划数据进行比较,以交互方式分析执行情况与飞行计划 ff 使用同步显示器同时重建多架飞机的飞行,通过空中机动精确跟踪相对位置
低能见度条件下的自动化支持:虚拟停止...
简介和背景 虚拟区块控制 (VBC) 概念描述了低能见度条件下机场地面控制程序,必须将其视为普通区块控制(也称为程序控制)的增强。当应用程序控制时,机场塔台的 ATC 会将飞机放行到机场活动区内可视位置,例如中间等待位置 (IHP)。一系列可视位置形成所谓的控制区块,其中每次只有一架飞机滑行,以防止碰撞并提高低能见度下的运行安全性。飞行员在到达控制区块的净空限制时报告飞机位置。虽然这种操作可以被认为是安全的,但它会降低活动区的机场容量以及滑行吞吐量 [10]。
国际飞机任务规划系统 (IAMPS) - Leidos
f 支持在 2D/3D 视图中进行任务演练,通过真实的飞行预览显示地图上的位置,并从飞行员的角度在 3D 合成环境中描绘飞机 f 审查从 IAMPS 任务计划应用程序导入的计划任务,以协调任务程序和目标行动 f 通过记录的航空电子数据流中的深入、明确细节进行行动后审查,以在最佳回忆间隔内提供关键反馈 f 将记录的飞机位置、驾驶舱视频和飞行音频与从 IAMPS 任务计划应用程序导入的规划数据进行比较,以交互方式分析执行情况与飞行计划 f 使用同步显示器同时重建多架飞机的飞行,通过空中机动精确跟踪相对位置