XiaoMi-AI文件搜索系统
World File Search System飞行中

使用悬停地图的 20 多种方法 - 无人机公司
Hovermap 先进的防撞和自主功能使无人机保持安全距离,从而降低资产风险。这些点云数据集是在一次飞行中捕获的,并按海拔高度着色。可以携带额外的摄像头进行状况评估。

启用 IAM 和载人 VTOL 飞机,初始
UAM.OP.VCA.050 范围...................................................................................................... 190 UAM.OP.VCA.105 使用机场或运行场地 .............................................................................. 190 UAM.OP.VCA.125 滑行和地面活动 ...................................................................................... 191 UAM.OP.VCA.130 噪声消减程序 ...................................................................................... 191 UAM.OP.VCA.135 航线和运行区域 ...................................................................................... 191 UAM.OP.VCA.145 确定最低飞行高度和侧向净空距离 ............................................................................................. 192 UAM.OP.VCA.150 燃料/能源方案 - 一般规定 ............................................................................. 192 UAM.OP.VCA.155 燃料/能源方案 - 燃料/能源规划和飞行中重新规划 .193 UAM.OP.VCA.160 燃料/能源方案——机场或运营地点的选择 .............................................. 195 UAM.OP.VCA.165 燃料/能源方案——飞行中燃料/能源管理 .............................................. 195 UAM.OP.VCA.170 航空器的特殊加油或放油 ............................................................................. 195 UAM.OP.VCA.190 提交 ATS 飞行计划 ............................................................................. 196 UAM.OP.VCA.210 飞行员在其指定站点 ............................................................................. 196 UAM.OP.VCA.245 气象条件 ............................................................................................. 196 UAM.OP.VCA.250 冰和其他污染物——地面程序 ............................................................................. 196 UAM.OP.VCA.255 冰和其他污染物——飞行程序 ............................................................................. 196 UAM.OP.VCA.260燃油供应 ................................................................................................................ 198 UAM.OP.VCA.265 起飞条件 ................................................................................................ 198 UAM.OP.VCA.270 最低飞行高度/高 ........................................................................................ 198 UAM.OP.VCA.275 模拟飞行中的异常情况 ............................................................................. 198 UAM.OP.VCA.290 接近检测 ...................................................................................................... 198 UAM.OP.VCA.295 防撞 ............................................................................................................. 199 UAM.OP.VCA.300 进近和着陆条件 ............................................................................................. 199 UAM.OP.VCA.315 飞行小时报告 ............................................................................................. 199 UAM.OP.MVCA.050 范围 ............................................................................................................. 199 UAM.OP.MVCA.100 使用空中交通服务(ATS) ................................................................ 199 UAM.OP.MVCA.107 适当的机场 .............................................................................. 200 UAM.OP.MVCA.110 机场运行最低标准 .............................................................................. 201 UAM.OP.MVCA.125 仪表离场和进近程序 ...................................................................... 201 UAM.OP.MVCA.126 基于性能的导航(PBN) ............................................................. 201 UAM.OP.MVCA.155 特殊类别旅客(SCP)的运载 ............................................................. 202 UAM.OP.MVCA.160 行李和货物的积载 ............................................................................. 202

可能的任务:parastronaut计划可以使空间旅行更具包容性,并且可以实现
安全性和包含在太空飞行中不需要矛盾。相反,代理商可以重新设计和培训过程,以确保更多的人可以安全地参与太空任务。通过通过技术,创新设计和任务计划来解决安全问题,空间行业可以具有包容性和成功的任务。
AAIB 公告 6/2023
几位目击者报告称,飞机的飞行高度比他们通常看到的飞机飞行高度低,而且离机场更近。据报道,飞机在每次盘旋飞行中都在 Scrabo Hill 内飞行(图 3)。几人报告称,发动机在这些盘旋飞行中听起来像是在挣扎。再次起飞后,飞机盘旋爬升至机场上方 1,600 英尺。然后它盘旋下降,完成几圈飞行后降落在 33 号跑道上(图 2 - 点 3)。19:07 时,机场一名手持无线电的人听到女飞行员在无线电中评论风,目击者认为这是指飞机刚刚完成的进近和着陆。飞机再次起飞并完成另一次左转盘旋返回 33 号跑道(图 2 - 点 4)。记录数据显示,飞机在飞行到此时为止的大多数转弯中倾斜角度约为 30°,但在一次下降转弯中倾斜角度达到 47°。
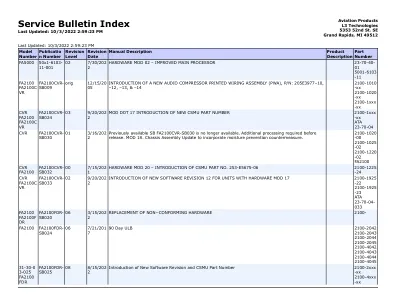
服务公告索引 - L3Harris
TRC691 SB-105 原始 9/3/2002 雷达数据库已更新(版本 RD01M21A),其中包含 Goodrich Avionics Systems 根据雷达数据收集飞行开发的信息。 805-10012 -003 805-10012 -013 RT-1634 (V) SB-106 原始 10/24/20 02 更正 ARINC-429 回波标签的“保持模式”状态。 805D0602 -43 TAWS80 00 SB-108 原始 2/12/200 3 生产变更,将专利号添加到序列号和 ID 标签中。 805-18000 -001 TRC691 SB-109 原始 2/13/200 3 雷达数据库已使用 FAA 于 2002 年发布的数据和 Goodrich Avionics Systems 从雷达数据收集飞行中开发的信息进行了更新。805-10012 -003 805-10012 -013 TRC691 SB-110 原始 2/13/200 3 雷达数据库已使用 FAA 于 2002 年发布的数据和 Goodrich Avionics Systems 从雷达数据收集飞行中开发的信息进行了更新。该数据库包括低 PRF 雷达的数据。

基于改进的人类飞行安全评估...
人为失误是影响航空安全的最重要风险因素之一。原有为核工业开发的认知可靠性与误差分析方法 (CREAM) 对于人为可靠性量化是可靠的,但它并不完全适用于航空中的人为可靠性分析,因为它忽略了长时间飞行的特点。本文,我们提出了一种改进的 CREAM 方法来预测飞行中的人为失误概率,并为关键操作提供一些改进措施。建立了一组性能影响因素 (PIF),例如飞行程序和地面支持,以反映飞行中的操作场景。然后,我们开发了 PIF 的预期影响指数和场景影响指数,以构建人为可靠性的定量模型。利用改进的 CREAM 方法计算了进近和着陆阶段每个操作的人为失误概率,结果表明影响人为可靠性最重要的认知功能是误操作。考虑到长时间飞行,该方法可能是一种适用于航空人为可靠性量化的工具。该方法对提高飞行安全性也具有重大的实际意义。


航天器飞行过程中废弃物抛弃
学生项目概述:NASA 寻求创新的废物抛射系统,该系统必须高效可靠,以免对航天器、机组人员或其他行星造成危险。在没有废物抛射系统的情况下,由于航天器在机动过程中质量较大,因此任务将需要额外的推进剂。因此,需要一个飞行中的大质量废物控制系统来向太阳抛射。
波音 767-300 货机
波音公司已交付了超过 1,063 架 767 飞机,这些飞机由全球 120 多家运营商运营。767 家族已累计飞行超过 1,780 万次,运送了数百万名乘客。在 1,470 万次飞行中,约有 360 万次飞行符合延长运营 (ETOPS) 规则。

欢迎阅读 Microchip 太空简讯第 28 期。本新闻稿面向设计工程师和设计经理、系统工程师和系统架构师,
• LX7730 遥测控制器 - 新数据表 • LX7712 可编程限流电源开关评估板现已上市 • Sub-QML FPGA 信息现已上线 • 文档更新:RT ProASIC3、RTAX 数据表和 RT FPGA 手册 • 将 MathWorks FIL 工作流程与 Microchip RTG4™ FPGA 开发套件集成 • Vectron 的 DOC203679、Rev F 和 OS-68338、Rev P 为业界提供小型化太空合格时钟 • Microchip 宣布 ATMX150RHA ASIC 技术的 DLA SMD 编号 • Libero® SoC Design Suite v12.4 版本支持 RT PolarFire® FPGA • 适用于航天和航空应用的高性能多轴电机控制 • 耐辐射微控制器 - 系统错误管理通过 SAMBA 接口实现飞行中系统恢复 • 使用 RH 对 RT FPGA 进行飞行中重新编程微控制器 • 工程师对辐射效应的看法,第 2 部分:BJT 和 MOSFET 中的 SEE • RTG4 FPGA 产品变更通知和客户通知 • 事件