XiaoMi-AI文件搜索系统
World File Search System飞行高度

2018 年蓝天使 FAA LOA
2024 ACC 单机演示队和 USAFHFP 机动是可以接受的,如空军手册 11-246 第 1 卷所述。ACC 单机演示队和 USAFHFP 有权在露天人群(例如体育场、游行、葬礼)上进行非特技飞行,但须遵守 §91.119 (b),飞行高度不得超过最高障碍物 500 英尺,飞行路线两侧 1,000 英尺,且飞行高度须符合飞越 CoW 的规定。必须符合 § 91.319 (c) 的实验飞机无权进行这些飞越。对于所有请求的飞越,必须向管辖范围内的 FSDO 提交 DD 表格 2535,与管辖范围内的空中交通管制机构协调,并需要指挥部批准。USAFHFP 必须确保在进入和离开期间,经授权的民用实验飞机和飞越人口稠密地区的飞行符合 §91.319 (c)。持有实验适航证书的民用飞机不得飞越人口稠密地区。我们将向 FAA 航空事件专家 (AES) 和 FSDO 提供 2024 ACC 单机演示团队、USAFHFP 机动包和已接受飞行员名单。此包还将用于进行场地可行性确定和未来演示的空域要求以及填写 DD 表格 2535。所有事故和事件都必须报告给 AFS-830 通用航空运营和商业部门经理,并在 24 小时内提供简报。

DR1560 - Riegl 美国
DR1560 提供各种数据接口,普遍适用于存储使用全波形激光扫描仪 RIEGL LMS-Q1560 和 LMS-Q780 以及 RIEGL 的新型在线波形处理 V 线激光扫描仪获取的数据。使用固态硬盘可提高在恶劣环境和高飞行高度下的可靠性。驱动器可热插拔,允许立即访问已获取的数据,随时可以在飞行中或在办公室进行分析。高达 150 MBytes/秒的数据速率可确保不间断地存储数据,满足当前和未来几代 RIEGL 高速激光扫描仪的要求。此外,在将扫描数据传输到固态硬盘之前,还会执行在线数据完整性检查。
DR1560 - Riegl 美国
DR1560 提供各种数据接口,普遍适用于存储使用全波形激光扫描仪 RIEGL LMS-Q1560 和 LMS-Q780 以及 RIEGL 的新型在线波形处理 V 线激光扫描仪获取的数据。使用固态硬盘可提高在恶劣环境和高飞行高度下的可靠性。这些驱动器可热插拔,允许立即访问已获取的数据,随时可以在飞行中或在办公室进行分析。高达 150 MBytes/秒的数据速率可确保不间断地存储数据,满足当前和未来几代 RIEGL 高速激光扫描仪的要求。此外,在将扫描数据传输到固态硬盘之前,还会执行在线数据完整性检查。
东盾» 第一部分 08/11/2020 12:00 - IVAO
414018N1313021E 到区域 1 或 2(地图上标记为虚线)。进入 ZKP100 后下降到 3000/4000 英尺。飞行高度将由组织者在 HQ-SOD 网站注册后确定。使用扩展方块技术在该区域进行搜索。每次观察到潜艇都应向 HQ-SOD Discord 服务器的中继机组报告,并指定位置坐标。(搜索区域 1 - 中继飞机在区域 3;搜索区域 2 - 中继飞机在区域 4)。搜索完成后返回 415400N1311300E,然后通过 WDT VOR/DME 108.2 返回符拉迪沃斯托克 (UHWW)。
Banshee Whirlwind - QinetiQ
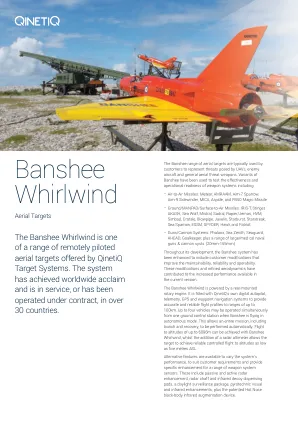
Banshee Whirlwind 由后置转子发动机驱动。它配备了 QinetiQ 自己的数字自动驾驶仪、遥测、GPS 和航路点导航系统,可提供精确可靠的飞行剖面图,飞行距离可达 100 公里。当 Banshee 处于自主飞行模式时,一个地面控制站最多可同时操作四辆车。这样可以自动执行整个任务,包括发射和回收。Banshee Whirlwind 可以飞到高达 6096 米的高度,而增加雷达高度计可以使目标实现可靠的受控飞行,飞行高度低至 5 米 ASL。

皮奥里亚公园区行政程序
无人机的重量不得超过三 (3) 磅。 无人机的翼展或旋翼直径不得超过 3 英尺。 飞行范围仅限于指定的公园区场地。 禁止携带杀伤人员装置(射弹、化学武器、电气武器、定向能武器、爆炸物和枪械)。 飞行高度必须低于五十 (50) 英尺,且周围没有障碍物。 操作员必须始终保持对无人机的视线,并且不得借助矫正镜片以外的任何设备。 禁止在人群附近或上方飞行。 禁止在动物附近或上方飞行。 仅限白天操作。 禁止粗心或鲁莽操作。 操作员和无人机系统必须遵守所有联邦、州、地方和 FAA 法规和法律。
LH-sustainability-report-2007.pdf - 汉莎航空集团
排放量 飞行运营排放量的计算基于当年的实际运输绩效和燃料消耗。在此背景下,机队中存在的每种飞机-发动机组合均被单独考虑,并通过各自飞机和发动机制造商提供的计算机程序计算相应的值。然后将机队中每个此类子集的年度平均飞行曲线输入这些程序。这使我们能够确定与飞行高度、飞行距离、推力和负载相关的排放量。这种方法对于氮氧化物 (NO X )、一氧化碳 (CO) 和未燃烧碳氢化合物 (UHC) 尤其必要。CO 2 排放量不需要特殊的计算方法,因为它们的产生与燃烧的煤油量成固定关系。

启用 IAM 和载人 VTOL 飞机,初始
UAM.OP.VCA.050 范围...................................................................................................... 190 UAM.OP.VCA.105 使用机场或运行场地 .............................................................................. 190 UAM.OP.VCA.125 滑行和地面活动 ...................................................................................... 191 UAM.OP.VCA.130 噪声消减程序 ...................................................................................... 191 UAM.OP.VCA.135 航线和运行区域 ...................................................................................... 191 UAM.OP.VCA.145 确定最低飞行高度和侧向净空距离 ............................................................................................. 192 UAM.OP.VCA.150 燃料/能源方案 - 一般规定 ............................................................................. 192 UAM.OP.VCA.155 燃料/能源方案 - 燃料/能源规划和飞行中重新规划 .193 UAM.OP.VCA.160 燃料/能源方案——机场或运营地点的选择 .............................................. 195 UAM.OP.VCA.165 燃料/能源方案——飞行中燃料/能源管理 .............................................. 195 UAM.OP.VCA.170 航空器的特殊加油或放油 ............................................................................. 195 UAM.OP.VCA.190 提交 ATS 飞行计划 ............................................................................. 196 UAM.OP.VCA.210 飞行员在其指定站点 ............................................................................. 196 UAM.OP.VCA.245 气象条件 ............................................................................................. 196 UAM.OP.VCA.250 冰和其他污染物——地面程序 ............................................................................. 196 UAM.OP.VCA.255 冰和其他污染物——飞行程序 ............................................................................. 196 UAM.OP.VCA.260燃油供应 ................................................................................................................ 198 UAM.OP.VCA.265 起飞条件 ................................................................................................ 198 UAM.OP.VCA.270 最低飞行高度/高 ........................................................................................ 198 UAM.OP.VCA.275 模拟飞行中的异常情况 ............................................................................. 198 UAM.OP.VCA.290 接近检测 ...................................................................................................... 198 UAM.OP.VCA.295 防撞 ............................................................................................................. 199 UAM.OP.VCA.300 进近和着陆条件 ............................................................................................. 199 UAM.OP.VCA.315 飞行小时报告 ............................................................................................. 199 UAM.OP.MVCA.050 范围 ............................................................................................................. 199 UAM.OP.MVCA.100 使用空中交通服务(ATS) ................................................................ 199 UAM.OP.MVCA.107 适当的机场 .............................................................................. 200 UAM.OP.MVCA.110 机场运行最低标准 .............................................................................. 201 UAM.OP.MVCA.125 仪表离场和进近程序 ...................................................................... 201 UAM.OP.MVCA.126 基于性能的导航(PBN) ............................................................. 201 UAM.OP.MVCA.155 特殊类别旅客(SCP)的运载 ............................................................. 202 UAM.OP.MVCA.160 行李和货物的积载 ............................................................................. 202
DR1560 - Riegl 美国
DR1560 提供各种数据接口,普遍适用于存储使用全波形激光扫描仪 RIEGL LMS-Q1560 和 LMS-Q780 以及 RIEGL 的新型在线波形处理 V 线激光扫描仪获取的数据。使用固态硬盘可提高在恶劣环境和高飞行高度下的可靠性。驱动器可热插拔,允许立即访问已获取的数据,随时可以在飞行中或在办公室进行分析。高达 150 MBytes/秒的数据速率可确保不间断地存储数据,满足当前和未来几代 RIEGL 高速激光扫描仪的要求。此外,在将扫描数据传输到固态硬盘之前,还会执行在线数据完整性检查。
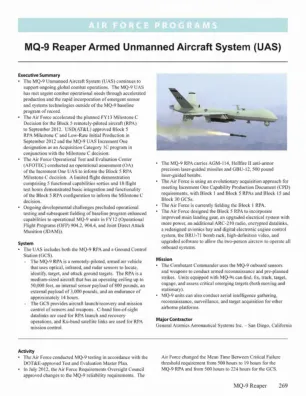
MQ-9 Reaper 武装无人机系统 (UAS)
UAS 包括 MQ-9 RPA 和地面控制站 (GCS)。 - MQ-9 RPA 是一种遥控武装飞行器,使用光学、红外和雷达传感器来定位、识别、瞄准和攻击地面目标。 RPA 是一种中型飞机,飞行高度可达 50,000 英尺,内部传感器有效载荷为 800 磅,外部有效载荷为 3,000 磅,续航时间约为 14 小时。 GCS 提供飞机的发射/回收以及传感器和武器的任务控制。 C 波段视距数据链用于 RPA 发射和恢复操作,Ku 波段卫星链路用于 RPA 任务控制。