XiaoMi-AI文件搜索系统
World File Search System馈电

生物反馈电刺激疗法的效率与低强度脉冲超声处理勃起功能障碍:临床
摘要背景:勃起功能障碍(ED)是一种普遍的疾病,可显着影响患者及其伴侣的生活质量。当前的治疗方法通常难以满足所有患者的各种需求。此外,低强度脉冲超声(Lipus)在改善ED症状方面的功效不足。因此,本研究旨在评估脂肪的有效性,并评估将Lipus与生物反馈电刺激进行骨盆底治疗是否可以增强治疗结果。方法:我们回顾性检索并评估了西中国第四医院治疗的68例患者的数据。,有30名患者仅接受了脂肪治疗,而38例接受了脂肪和生物反馈电刺激的联合治疗。两组完成了八次治疗课程。结果:在处理后,使用勃起功能5(IIEF-5),勃起硬度评分(EHS)和勃起满意度得分(ESS)的国际指数测量处理的疗效,4和8处理后。在IEIF-5,EHS和ESS分数中仅脂肪组中观察到显着改善(所有度量的P <0.001)。八次治疗后的正反应率为79.41%。在两组中都观察到IIEF-5分数的改善(Lipus:11.50至16.60;合并治疗:10.61至16.90; P <0.001)以及EHS分数(Lipus:2.27至3.07; 3.07;合并治疗:合并治疗:2.26至3.11; P <0.001; P <0.001)。然而,仅脂肪和联合治疗组之间没有发现统计学上的显着差异(p> 0.05)。结论:Lipus治疗表现出减轻ED症状的潜力,并且与单独的Lipus相比,对骨盆底治疗的生物反馈电刺激并没有导致明显优于的结果。需要进一步的样本量和更长的治疗持续时间来确认这些结果。
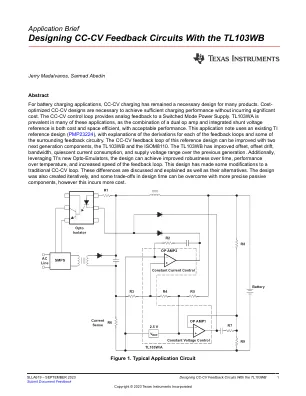
使用TL103WB设计CC-CV反馈电路
用于电池充电应用程序,CC-CV充电仍然是许多产品的必要设计。成本优化的CC-CV设计对于实现足够的充电性能而不产生大量成本是必要的。CC-CV控制回路为开关模式电源提供了模拟反馈。tl103wa在许多这些应用中都普遍存在,因为双重操作放大器和集成的分流电压参考的组合既具有成本又是空间效率,并且具有可接受的性能。本应用程序使用现有的Ti参考设计(PMP23224),并解释了每个反馈回路的派生和一些周围的反馈电路。使用两个下一代组件TL103WB和ISOM8110可以改进此参考设计的CC-CV反馈回路。TL103WB在上一代中改善了偏移,偏移漂移,带宽,静止电流和供应电压范围。此外,利用Ti的新光发光器,该设计可以随着时间的流逝而提高鲁棒性,在温度上的性能以及反馈回路的速度提高。这种设计对传统的CC-CV循环进行了一些修改。讨论和解释了这些差异及其替代方案。设计也是迭代创建的,并且可以通过更精确的被动组件克服设计时间的某些权衡,但是这会增加成本。

低剖面、超宽带和双极化天线及馈电系统
致谢 我感谢巴黎高科电信射频和微波 (RFM) 实验室成员在这项研究中所做的一切努力。我特别要感谢我的主任 Xavier BEGAUD 先生对我研究的指导和支持。他毫不犹豫地给出了有益的建议。感谢 Mahmoud KAMAREI 教授和 Alireza KAZEMIPOUR 博士对这篇论文的热情和创造性关注。我还要感谢小组主任 Bernard HUYART 教授的诚挚建议和支持。他们对我研究的评论对提高论文质量非常有帮助。我还要感谢 B. HUYART 教授接受评审团主席职位,以及 Adaildo GOMES D’ASSUNCAO 教授和 Ala SHARAIHA 教授,他们慷慨地同意报告这篇论文并引起关注。我要特别感谢我的妻子 Noushin,感谢她帮助我制作平衡器、天线和测量,以及分享想法。她鼓励我完成这项研究,如果没有她的支持和祈祷,我根本无法完成我的论文。我感谢我的父母,他们每天都为我祈祷,耐心等待这篇伊朗的博士论文。感谢我的兄弟姐妹 Farshid、Mahshid 和 Maysam 以及他们的家人。我要感谢我的公公婆婆的支持和关爱。我还要感谢我的姐姐和姐夫 Minoush 和 Sasha。

双输出向前转换器,带有空间的馈电前控制器
由于与其他电源存储方法相比,其每单位质量高能量,因此锂离子电池目前在大多数便携式消费者小工具1(例如手机和笔记本电脑)中使用。它们还具有高功率与重量比,出色的高温性能和最小的自我释放。锂离子(液化)电池在近几十年以来,作为各种应用的可行动力来源,包括电动汽车和混合动力汽车,电网和太阳能储能。li-ion电池被广泛推荐为扩展驾驶范围和快速加速的电源。li-ion电池在快速充电期间产生热量,并在高电流水平下排放周期。此外,温度和不均匀性对其储能能力和耐用性有重大影响。

具有增强增益的紧凑型共面带馈电 UWB 天线
[2][3]作者介绍了一种锥形缝隙天线和一种对映锥形缝隙天线,通过合并六个以上的谐振来实现 UWB 响应。这种结构有许多几何参数,并且在不同频率下获得的辐射模式也不稳定。Hoods 等人 [4] 提出了一种双平面 UWB 结构,它具有小增益和不均匀的辐射模式。在 [5] 中,作者介绍了一种紧凑型 UWB 天线,其中通过两个半圆来增强带宽。在 [6] 中,通过引入一个带缝隙的附加环形结构来实现 UWB 操作。[7] 中讨论了一种基于混合缝隙馈电网络的 UWB 天线。[8] 中介绍了通过在微带馈电的接地平面上创建 UWB 特性。Shameena 等人 [9] 介绍了一种 CPW 馈电 UWB,其中使用具有许多维参数的阶梯形缝隙来实现 UWB 特性。C Vinisha 等人[10] 介绍了一种电小尺寸 CPW 馈电 UWB,其中使用环形环来获得超宽带宽。S. Nicolaou 等人在 [11] 中讨论了一种 UWB 辐射器,其槽呈指数锥形,尺寸非常大,增益很小。[12] 介绍了一种非均匀辐射、小增益 UWB 偶极天线。它提供了较差且高度失真的脉冲响应。[13] 讨论了一种适用于医学成像应用的定向 UWB,尺寸非常大,辐射方向图不均匀。然而,上述所有天线尺寸都很大或结构复杂

具有多轴推力矢量的纤维馈电脉冲等离子推力器 (FPPT) IEPC 2022-558 在第 37 届国际电力推进会议上发表
具有多轴推力矢量的纤维馈电脉冲等离子推力器 (FPPT) IEPC 2022-558 在第 37 届国际电力推进会议上发表 麻省理工学院,美国马萨诸塞州剑桥 2022 年 6 月 19 日至 23 日 Curtis A. Woodruff 1、Magdalena Parta 2、Darren M. King 3、Rodney L. Burton 4 和 David L. Carroll 5 CU Aerospace (CUA),美国伊利诺伊州香槟市 61822 摘要:CU Aerospace (CUA) 开发了同轴纤维馈电脉冲等离子推力器 (FPPT),具有多轴推力矢量能力,可为小型卫星实现高脉冲主推进任务。推进器子系统测试采用 1.7U 系统配置,配备 26 J 储能单元 (ESU),运行功率为 78 瓦 (3 Hz),平均推力为 0.60 mN,比冲为 3,500 s,效率为 13%。推进器性能随燃料进给率而变化。加速子系统寿命测试显示,电容器充电/放电循环次数超过 16 亿次,电流波形几乎相同。独立控制输入功率和推进剂进给率的能力允许调整推力水平和 Isp。迄今为止的测试表明,电磁推力矢量控制能力在俯仰和偏航轴上达到 ±10 度左右。此外,该系统还有可能提供对滚转轴的控制权。俯仰和偏航推力矢量控制性能与最近的推进器性能改进一起展示。一台总冲量为 28,000 Ns 的 1.7U FPPT 正在集成到 CUA 的 NASA 资助的双推进实验 (DUPLEX) 立方体卫星上,目前计划于 2023 年第一季度发射。FPPT 技术是一种极具吸引力的选择,可以满足许多微推进需求,包括延长轨道机动、防撞机动、深空任务、阻力补偿和脱离轨道。命名法

多模航天器推进系统的电源处理单元和馈电系统开发
多模式航天器推进系统集成了两种或多种使用共享推进剂的推进模式。伊利诺伊大学厄巴纳-香槟分校目前正在与 Froberg Aerospace, LLC 合作开发一种结合化学分解模式和电喷雾模式的多模式系统。从根本上讲,多模式航天器推进系统由推进器、电源处理单元和推进剂进料系统组成。本文详细介绍了之前开发的原型单推进剂电喷雾推进器的电源处理单元和进料系统的持续开发。电源处理单元由两个独立的升压电路组成,一个在电喷雾操作期间提供 3.25 kV DC,另一个在化学模式操作期间提供 24 V DC。进料系统架构是一个单一的气体加压系统,每个操作模式都有不同的流路,并且必须在电喷雾模式下提供约 850 nL/s 的体积流速,在化学模式下提供 100 μL/s 的体积流速。

为立方体卫星提供联合馈电的圆极化 X 波段贴片阵列天线
多尺度实验 (SWARM-EX) 是由三颗立方体卫星组成的集群,将以综合方式探测赤道电离和热层异常(300 公里 - 600 公里)。• 卫星间距离从 0.25 公里到 1000 公里不等。• 这项探索任务具有科学、工程和教育目标。• 由大学牵头的与 6 所大学的合作项目

b'摘要 提出了一种毫米波\xe2\x80\x90 低\xe2\x80\x90 轮廓宽带微带天线。为了加宽阻抗带宽并同时实现稳定的大增益,在由同轴探针馈电的微带贴片两侧布置共面寄生贴片阵列。在微带贴片上蚀刻双槽以降低 H \xe2\x80\x90 平面交叉\xe2\x80\x90 极化水平。提出了使用 Floquet \xe2\x80\x90 端口模型进行零\xe2\x80\x90 相位\xe2\x80\x90 反射分析以预测寄生贴片阵列的谐振频率。根据理想探针的输入阻抗来验证激发的谐振模式。依次激励两个相邻的宽边谐振,分别以微带贴片的准 \xe2\x80\x90 TM 10 模式和寄生贴片阵列的准 \xe2\x80\x90 TM 30 模式为主导。所提出的天线尺寸为 1.06 1.06 0.024 \xce\xbb 0 3(\xce\xbb 0 为自由空间中 29 GHz 的波长),在 | S 11 | \xe2\x89\xa4 10 dB 时实现 15%(27\xe2\x80\x93 31.35 GHz)的阻抗带宽。实现的峰值增益高达 9.26 dBi,2 \xe2\x80\x90 dB 增益带宽为 15.7%。 H \xe2\x80\x90 平面交叉 \xe2\x80\x90 极化水平在 3 \xe2\x80\x90 dB 波束宽度内小于 14 dB,背部辐射水平小于 17.9 dB。'
b'摘要 提出了一种毫米波\xe2\x80\x90 低\xe2\x80\x90 轮廓宽带微带天线。为了加宽阻抗带宽并同时实现稳定的大增益,在由同轴探针馈电的微带贴片两侧布置共面寄生贴片阵列。在微带贴片上蚀刻双槽以降低 H \xe2\x80\x90 平面交叉\xe2\x80\x90 极化水平。提出了使用 Floquet \xe2\x80\x90 端口模型进行零\xe2\x80\x90 相位\xe2\x80\x90 反射分析以预测寄生贴片阵列的谐振频率。根据理想探针的输入阻抗来验证激发的谐振模式。依次激励两个相邻的宽边谐振,分别以微带贴片的准 \xe2\x80\x90 TM 10 模式和寄生贴片阵列的准 \xe2\x80\x90 TM 30 模式为主导。所提出的天线尺寸为 1.06 1.06 0.024 \xce\xbb 0 3(\xce\xbb 0 为自由空间中 29 GHz 的波长),在 | S 11 | \xe2\x89\xa4 10 dB 时实现 15%(27\xe2\x80\x93 31.35 GHz)的阻抗带宽。实现的峰值增益高达 9.26 dBi,2 \xe2\x80\x90 dB 增益带宽为 15.7%。 H \xe2\x80\x90 平面交叉 \xe2\x80\x90 极化水平在 3 \xe2\x80\x90 dB 波束宽度内小于 14 dB,背部辐射水平小于 17.9 dB。'

EEG控制的假肢 分析印度城市的开放公共空间 使用重力发电的研究论文 sub 中几个高级软件的概述 获取,预处理和EEG信号的特征提取到 Hall-Effect推进器(HET) 空间殖民化:原因,目标和方法。 双输出向前转换器,带有空间的馈电前控制器 电池中电池冷却系统的设计和开发 航空航天材料的演变:评论 使用IBM-Qiskit 的RSA加密货币实现量子 EV电池监控系统使用GSM 概述和详细的中小企业存储系统& 自动充电电动CA R 的制造和分析 “无线充电站的项目报告
根据思想或大脑信号为这些人开发新的假肢界面的机会[3]。BCI的基本思想是将用户产生的大脑活动模式转化为相应的命令[1]。bcis系统避免了传统的通信渠道,即肌肉和言语,它们通过将大脑活动实时转化为命令,提供人脑和物理设备之间的直接通信和控制。BCI使用非侵入性的脑电图传感器从大脑中获取信号,这是一种相对较低的成本解决方案,并且还避免了危险的侵入性手术,其中将电极放置在大脑内,称为植入物。EEG技术假设由受试者头皮上的电极记录脑波[3]。该系统包括四个不同的阶段。正在提取原始的脑电波,处理信号,将其分类为不同的命令信号,并将其连接到假肢。基于EEG的BCI系统可以实施以克服假肢问题。 基于EEG的大脑控制的假肢是一个BCI系统,它使用脑电波作为命令信号来控制假肢的动作。 实施的这个BCI系统与定期的人类控制的动作相同。 该系统将检测可用作命令信号的脑电波,以控制屈曲和伸展的假肢运动。 屈曲和延伸取决于受试者的浓度水平和眼睛眨眼。 假体的控制取决于一个人的思想集中和集中精力的能力。基于EEG的BCI系统可以实施以克服假肢问题。基于EEG的大脑控制的假肢是一个BCI系统,它使用脑电波作为命令信号来控制假肢的动作。实施的这个BCI系统与定期的人类控制的动作相同。该系统将检测可用作命令信号的脑电波,以控制屈曲和伸展的假肢运动。屈曲和延伸取决于受试者的浓度水平和眼睛眨眼。假体的控制取决于一个人的思想集中和集中精力的能力。这可以通过几天的培训来实现。本文介绍的项目旨在使用EEG Neuro-Feedback技术通过大脑活动来开发可控制的低成本和多功能人类的假肢。