XiaoMi-AI文件搜索系统
World File Search System驱动器
在电池式操作中驱动器 - iot-iot-device。 ...
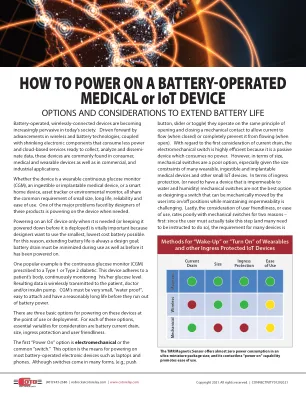
按钮,滑块或切换)它们以相同的打开和关闭机械触点的原则进行操作,以允许电流到流(关闭时)或完全阻止其流动(打开时)。关于当前排水的第一个考虑,机电开关非常有效,因为它是一种无动力的被动装置。然而,就尺寸而言,机械开关是一个差的选择,尤其是考虑到许多可穿戴,可耐用和可植入的医疗设备以及其他小型物联网设备的尺寸限制。就入口保护而言(或需要具有不渗透水和湿度的设备)机械开关并不是最佳选择,因为设计开关可以机械地将其机械移动到ON/OE效率的同时,同时保持不理性是有挑战性的。最后,考虑用户友好性或易用性,与机械开关相差很差,原因有两个 - 第一:由于用户必须实际采取此步骤(并且需要指示许多设备的要求),因此许多设备的要求是

56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。

GVX9000。适用于全球应用的驱动器。 - Datasheet.su
伊顿的 GVX9000 可调频驱动器可满足每一位用户和应用的需求 — 出于各种原因。一切始于致力于为独特应用打造合适的产品,其功能可满足个人需求。无论是目录中提供的标准解决方案还是定制解决方案,伊顿都能满足您的需求。您不能仅仅将产品称为每种应用的完整解决方案。您必须证明这一点。这正是我们在每款产品中都会发现的。GVX9000 是一款真正的全球性产品,它为 OEM 提供了在全球范围内交付设备的灵活性。
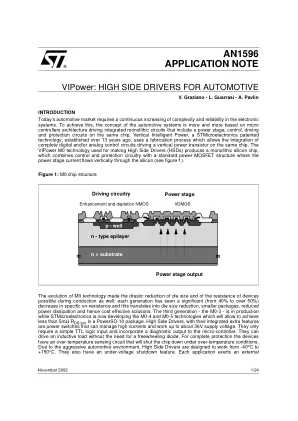
AN1596 VIPower:汽车高侧驱动器
简介 当今的汽车市场要求电子系统的复杂性和可靠性不断提高。为了实现这一目标,汽车系统的概念越来越多地基于微控制器架构,该架构驱动集成单片电路,包括同一芯片上的功率级、控制、驱动和保护电路。垂直智能电源是意法半导体的一项专利技术,成立于 13 年前,采用的制造工艺允许在同一芯片上集成完整的数字和/或模拟控制电路来驱动垂直功率晶体管。用于制造高侧驱动器 (HSD) 的 VIPower M0 技术可生产单片硅片,该硅片将控制和保护电路与标准功率 MOSFET 结构相结合,其中功率级电流垂直流过硅片(见图 1)。
TDA7073A;TDA7073AT 双 BTL 功率驱动器
反馈为 33.5 dB,器件可在宽电源电压范围(3 至 18 V)内工作。器件可提供最大 0.6 A 的输出电流。在所有输入条件下,输出可在负载、电源和接地上短路。差分输入可处理从地电平到(V P − 2.2 V,最大 10 V)的共模输入电压。器件具有非常高的压摆率。由于带宽大,它们可以处理高达 176 kHz 的 PWM 信号。

PCO-7115-5-1 激光二极管驱动器模块数据表
说明 保修:材料和工艺缺陷保修一年,包括零件和人工。所有规格均在环境温度为 25°C 的自由空气环境中测量。由于电阻器 R1 和 R2 会产生约 3.7 W 的不必要的最坏情况热源,因此我们建议使用至少 17.66 CFM 的气流源对 PC 板进行空气冷却。排气理想情况下应位于 R1 和 R2 后面,以便热气流直接排出,而不会穿过模块。当以高于 3 A 的频率运行且频率大于 600 kHz 时,以及/或者当此模块在可能积聚热量的密闭区域中运行时,尤其建议使用这种额外的冷却。通常,用户应留出 15 分钟的预热时间以获得更稳定的输出。通过添加如上所述的气流冷却源可以大大提高稳定性。所有电气测量均在驱动短路负载时通过电流监视器连接进行。规格如有更改,恕不另行通知。
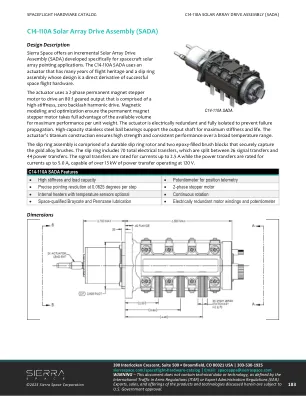
C14-110a太阳能阵列驱动器组件(SADA)
<3.4 kg,包括76.2厘米的飞行铅安全带台阶尺寸0.0625摄氏度调整速率1.0度/s输出扭矩 @ 1.0度/s 11英寸11英寸lb典型在77°F 1.2 nm惯性载荷> 86,452.6 lb-in 2> 25.3 kg-2> 25.3 kg-m 2> 25.3 kg-m 2 360 deg> 0.0 deg> 0.0 0.6 in lbm> 0.6 in lbm> 0.6 in lm> 0.0 nm nm nm nm> 0.0 nm nM电阻52.5Ω(标称,2相)滑动环功率转移44个转移 @ 5.0 AMPS最大滑动环信号传输26转移 @ 2.5安培最大电压28 VDC电压28 VDC电位计的电阻10kΩ合格的热环境温度,运行-31°F至160°F -355°C至71°C温度,2.112 -80°C至96°C注意:此数据仅用于信息,并且可能会更改。联系Sierra空间以获取设计数据。
技术人员:在(年轻专业人士:内部)卫星驱动器
成为我们国际团队Enpulsion的一部分,Enpulsion是一家基于维也纳机场的太空技术行业的公司。2016年创立,我们迅速发展成为空间行业的主要参与者,并出售了最先进的卫星驱动器解决方案之一。


一种新型的基于异步脑信号的驱动器——......
摘要:直接应用脑信号来操作移动载人平台(例如车辆)可能有助于神经肌肉疾病患者恢复驾驶能力。本文开发了一种基于脑电图(EEG)信号的新型驾驶员-车辆接口(DVI),用于脑控车辆的连续和异步控制。所提出的 DVI 由用户界面、命令解码算法和控制模型组成。用户界面旨在呈现控制命令并诱导相应的大脑模式。开发了命令解码算法来解码控制命令。建立控制模型以将解码的命令转换为控制信号。离线实验结果表明,所开发的 DVI 可以生成准确率为 83.59% 的运动控制命令,检测时间约为 2 秒,而在空闲状态下的识别准确率为 90.06%。基于 DVI 开发了实时脑控模拟车辆,并在 U 型转弯道路上进行了测试。实验结果表明 DVI 用于连续和异步控制车辆的可行性。这项工作不仅推动了脑控汽车的研究,而且为驾驶员-车辆界面、多模式交互和智能汽车提供了宝贵的见解。