XiaoMi-AI文件搜索系统
World File Search System鸟瞰图
能源部 - 纽约州国务院
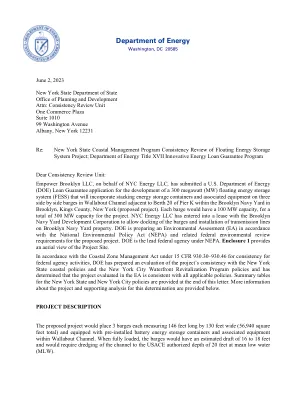
Empower Brooklyn LLC 代表 NYC Energy LLC 提交了一份美国能源部 (DOE) 贷款担保申请,用于开发 300 兆瓦 (MW) 浮动储能系统 (FESS),该系统将整合堆叠的储能容器和相关设备,位于纽约金斯县布鲁克林海军造船厂 K 号码头 20 号泊位附近的 Wallabout 海峡的三艘并排驳船上(拟议项目)。每艘驳船的容量为 100 MW,项目总容量为 300 MW。NYC Energy LLC 已与布鲁克林海军造船厂开发公司签订了租约,允许驳船停靠布鲁克林海军造船厂的土地并安装输电线路。DOE 正在根据《国家环境政策法》(NEPA) 和相关联邦环境审查要求为拟议项目准备环境评估 (EA)。DOE 是 NEPA 下的主要联邦机构。附件 1 提供了项目现场的鸟瞰图。

2024_Invest_Strategy_01_08_24.pdf - 科学与技术
本文档以第 1 部分中的 LLNL 鸟瞰图作为开篇,重点介绍了我们的使命和愿景声明。第 2 部分分解了我们的关键使命驱动承诺,并描述了目标和关键结果流程。第 3 部分重点介绍实验室的科学技术企业,并介绍我们的“S&T 动员者”——我们的人员、我们的设施和我们的核心竞争力——LLNL 的关键要素,是我们使命驱动工作的基础。第 4 部分介绍了 LLNL 的内部资金来源,并描述了每个资金来源如何支持持续卓越的研发。还重点介绍了外部赞助商对我们的 S&T 动员者的支持。第 5 部分解释了定期投资组合审查和指标使用的流程和重要性,因为建立可持续的成功依赖于监测结果。第 6 部分展望了实验室科学组合的未来状态以及我们的 S&T 动员者不断发展的贡献。

人工智能原理有效吗? ——从非约束性原则到普遍性原则……
6 Shinpo,Fumio,“为什么要有‘机器人法’?”机器人法律协会成立筹备研究会报告(2015年10月11日)(2015年)。有关这些原则的详情,请参阅新浦文雄的《机器人法:法律领域问题的鸟瞰图》,《信息法研究》,第 9 卷,第 65-78 页(2017 年)和新浦文雄的《日本主要人工智能以及机器人战略和建立基本原则的研究,人工智能法律研究手册,Woodrow Barfield、Ugo Pagallo(编),Edward Elgar Publishing(2018)第 114-142 页,Jacob Turner,R OBOT规则:规范人工智能,Palgrave Macmillan;第一版。(2019 年)。7 规范欧洲新兴机器人技术:机器人技术面临的法律和伦理,FP7-SCIENCE-IN-SOCIETY-2011-1,项目编号:289092.8《深度剖析/成立律师协会有困难吗?“机器人的‘社会化推进’面临诸多挑战,业内人士表达异议”,日刊工业新闻,2016 年 1 月 18 日 https://www.nikkan.co.jp/articles/view/00371272 。
杂草管理计划
如果您不同意条款和条件,则不得使用此出版物。,您可以自由复制,交流和调整许可材料,前提是您遵守许可条款(包括归因),并使用以下声明属于许可材料:环境,公园和水安全部提供。©北领地政府。推荐引用:北领地政府(2024)。Gamba Grass 2020 - 2030年的杂草管理计划(2024年修订版),环境,公园和水安全部,达尔文。可以从NT.GOV.AU/GAMBA下载该计划,致谢杂草管理部门承认Gamba Grass杂草咨询委员会,土地管理者,土地所有者和所有主要利益相关者为制定这一修订后的计划提供了信息。封面上的照片积分:检查Gamba Grass(杂草管理分支),Gamba Grass喷涂(杂草管理分支),Gamba Grass Fire(David Muller),Gamba Grass Fire(Natalie Rossiter-Rachor)的鸟瞰图。

CMDA:基于 LiDAR 的 3D 物体检测的跨模态和领域对抗自适应
最近基于激光雷达的 3D 物体检测 (3DOD) 方法显示出良好的效果,但它们通常不能很好地推广到源(或训练)数据分布之外的目标域。为了减少这种领域差距,从而使 3DOD 模型更具泛化能力,我们引入了一种新颖的无监督领域自适应 (UDA) 方法,称为 CMDA,它 (i) 利用来自图像模态(即相机图像)的视觉语义线索作为有效的语义桥梁,以缩小跨模态鸟瞰图 (BEV) 表示中的领域差距。此外,(ii) 我们还引入了一种基于自训练的学习策略,其中模型经过对抗性训练以生成领域不变特征,这会破坏对特征实例是来自源域还是看不见的目标域的区分。总的来说,我们的 CMDA 框架指导 3DOD 模型为新颖的数据分布生成高度信息丰富且领域自适应的特征。在我们对 nuScenes、Waymo 和 KITTI 等大规模基准进行的大量实验中,上述内容为 UDA 任务提供了显著的性能提升,实现了最先进的性能。

理解设计师与人工智能之间的设计协作:系统文献综述
最近,人们对通过人工智能 (AI) 镜头进行设计的兴趣正在迅速增加。设计师作为与 AI 交互的特殊用户群体,在人机交互社区中受到了更多关注。先前的研究讨论了 AI 设计中持续存在的新挑战。然而,很少有系统的评论关注 AI 设计,以了解设计师和 AI 如何在设计协作中增强彼此的互补优势。在这项工作中,我们通过对 93 篇论文进行系统文献综述,对 AI 设计进行了概况分析。分析首先提供了该领域总体模式的鸟瞰图。分析还揭示了与 AI 设计相关的论文语料库中解释的三个主题,包括 AI 协助设计师、设计师协助 AI 以及描述设计师与 AI 的协作。我们讨论了我们的研究结果的含义,并提出了方法论建议,以指导 HCI 进行以协作创造力为中心的研究和实践。

蒙茅斯县公园系统冬季绿色遗产2024-25
无人机正在彻底改变大型公园景观和开放空间的管理。以新泽西体育和博览会局(NJSEA)Meadowlands区为例。他们将无人机用于从结构检查和洪水管理到监测湿地的健康。Meadowlands研究与恢复研究所(MRRI)市政无人机计划对于评估湿地如何处理雨水至关重要,考虑到该州的易受洪水的脆弱性,这一点尤其重要。有无人机提供的鸟瞰图,公园和高尔夫球场经理可以监测植被健康,轨道侵蚀和计划维护,而不会扰乱栖息地。配备了热成像技术的无人机也可以提高安全性,从而更容易找到丢失的访客并检查偏远地区。目前,蒙茅斯县公园系统使用无人机上使用热成像摄像机来审查建筑物内的热量损失,鹿种群监测以及可能的搜索和救援。越来越多的应用和好处,因此我们才开始刮擦表面。
通用原子公司低速磁悬浮技术开发计划(补充文件#3)
图表列表 第页 图 1-1 通用原子公司城市磁悬浮车辆采用以 Halbach 阵列配置排列的永磁体实现悬浮和推进 ............................................................................. 1-2 图 1-2 双 Halbach 阵列悬浮磁铁可提高升阻比,并提高主悬挂系统的刚度......................................................................... 1-2 图 1-3 试验轨道现场鸟瞰图 ......................................................................................................... 1-3 图 1-4 已完成的 120 米试验轨道基础和第一个 15 米导轨焊接件(左)。右图为已完成并准备翻转的导轨模块..................................................................................................................... 1-4 图 1-5 第一节轨道上已完成的测试底盘..................................................................................................... 1-4 图 1-6 车辆悬浮、推进和引导系统............................................................................................................. 1-5 图 1-7 绞合轨道的半自动焊接工艺可实现一致的接头电阻......................................................................... 1-5 图 1-8 电气室视图,其中装有整流器、变频逆变器和列车保护设备..... 1-6 图 1-9 测试期间的典型间隙和速度曲线将允许对车辆动力学进行评估.............................................

使用航拍图像和街道图像对公共物品进行分类
人类居住的世界的每个角落都是从多个视点以越来越高的频率拍摄的。谷歌地图或 Here Maps 等在线地图服务可以直接访问大量密集采样的、带有地理参考的街景和鸟瞰图像。我们有机会设计计算机视觉系统来帮助我们搜索、分类和监控公共基础设施、建筑物和文物。我们探索这种系统的架构和可行性。主要的技术挑战是结合每个地理位置的多个视图(例如鸟瞰图和街景)的测试时间信息。我们实现了两个模块:det2geo,它检测属于给定类别的对象的位置集,以及 geo2cat,它计算给定位置处对象的细粒度类别。我们介绍了一种采用最先进的基于 CNN 的对象检测器和分类器的解决方案。我们在“帕萨迪纳城市树木”上测试了我们的方法,这是一个包含 80,000 棵树木的新数据集,带有地理和物种注释,结果显示结合多种视图可以显著改善树木检测和树种分类,可与人类的表现相媲美。