XiaoMi-AI文件搜索系统
World File Search System50cm
风扇,支架,50厘米或以下
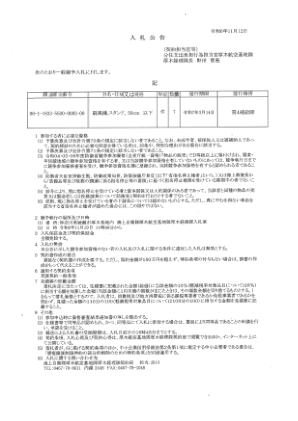
2024年10月16日 — (4)国防部部长秘书处卫生监督员、国防部……在投标同等或更高质量的产品时,必须在投标日期等前至少7天向合同官员提交目录和功能/性能比较表,并确认规格。
Gigawatt量表的高级制造过程质子交换膜水电解液
1。基于所证明的速率的制造速率,每个过程步骤都被外推到一台机器,并基于包含容量因素的过程模型。2。实验室CCM,具有0.20mg/cm 2 78wt%IR/NSTF粉末OER催化剂/电极,0.08mg/cm 2 pt/nstF分散的催化剂/电极,3M 800EW 100 MICRON MEMBRANE。50cm 2单元,80˚C,2A/cm 2。风VRE协议。3。通过50cm 2单元,80˚C,2A/cm 2,3m 800ew 100 micron膜,项目风变可再生能源(VRE)协议评估的项目目标。堆栈中的性能和耐用性里程碑脱离为1.735V和5µV/hr。

Gigawatt尺度质子交换膜水电解剂氧气进化反应催化剂和电极的高级制造工艺
1。基于所证明的速率的制造速率,每个过程步骤都被外推到一台机器,并基于包含容量因素的过程模型。2。实验室CCM,具有0.20mg/cm 2 78wt%IR/NSTF粉末OER催化剂/电极,0.08mg/cm 2 pt/nstF分散的催化剂/电极,3M 800EW 100 MICRON MEMBRANE。50cm 2单元,80˚C,2A/cm 2。风VRE协议。3。通过50cm 2单元,80˚C,2A/cm 2,3m 800ew 100 micron膜,项目风变可再生能源(VRE)协议评估的项目目标。堆栈中的性能和耐用性里程碑脱离为1.735V和5µV/hr。

SatSys X ISI - KNIGHT 卫星数据表_FA_020224
KNIGHT 卫星将由 ST Engineering Satellite Systems 和 ImageSat International (ISI) 联合开发。KNIGHT 卫星计划于 2027 年发射,它为地球观测任务提供高端功能和性能。这些功能包括 50 厘米的超高分辨率真彩色图像、每秒 28 帧的全动态视频 (FMV),以及 1.5 米的尖端 SWIR 成像技术。该卫星还配备了机载任务处理系统,并配有卫星间链路以支持动态任务。

空间碎片激光测距
夜间可视化需要使用孔径为 20 至 30 厘米的望远镜。由于直径为 20 厘米的空间碎片激光组件的出口孔径符合与孔径相关的规格,因此可以使用安装在空间碎片激光组件中的卫星摄像机进行夜间引导。对于具有比卫星摄像机的 FOV(视场)更大的角度偏移的目标的可视化,可以使用 Stare & Chase 望远镜。即使是夜间可以使用空间碎片激光系统测距的最小物体,也可以在两个摄像机中可视化。假设反射率为 20%,距离 600 公里的直径为 10 厘米的球形物体的亮度将为 11 mag。距离 1400 公里的直径为 50 厘米的球形物体将具有类似的亮度。对于最暗的物体,积分时间必须增加到几十分之一秒。

将915 MHz频段Lora应用于农业形式
摘要 - 使用Lorawan®(远距离大型网络)MAC层的LORA低功率宽面积网络调制方案,对于地下农业农业信息网络应用程序而变得流行。Lora使用CHIRP传播频谱技术,并获得Semtech许可。具有LORA收音机的传感器可以设计用于检测和测量可以从工业和雨水来源浸入农业土壤中的毒素。传感器可以用相机掩埋,可以检测和分类影响植物根部的病原体。传感器的测量和摄像机图像可以原位采样,并传输到农场上的地上中央洛拉集中器(网关)。洛拉设备可以埋在可变的深度,但是土壤和水都削弱了传输信号的强度。在这项工作中,我们进行实验以测量在不同的lora扩散因子,编码率和土壤深度下,在不同的lora扩散因子,编码速率和土壤深度下测量接收的信号强度指标(RSSI)和信号效力比(SNR)。我们的结果表明,对于农业形式的应用,Lora收发器埋葬深度不应超过50厘米。

南非航空摄影测量的现状
数字图像相机技术彻底改变了全球的航空图像捕捉。与传统的模拟航空图像方法相比,它提供了高空间和光谱分辨率以及卓越的效率和可靠性。这样一来,它为各种摄影测量应用提供了极大的准确性。南非测绘组织(现称为国家地理空间信息总局 (CD: NGI))早在 1930 年代就开始捕捉航空摄影。然而,从 2008 年开始,CD: NGI 开始过渡到以 50 厘米地面采样距离 (GSD)(从 2008 年到 2016 年)和 25 厘米 GSD(从 2017 年至今)捕捉数字航空图像。这导致已经捕获了 1370 张数字航空图像(这个数字将继续变化,因为仍有一些飞行工作尚未记录)。数字相机技术的不断增强为在可预见的未来以更高的空间分辨率(例如 10 厘米 GSD)拍摄国家航空图像提供了更多可能性。然而,持续的数字图像拍摄并非没有挑战,例如当前的全球 Covid-19 大流行导致预算重新调整、组织从一代到另一代的技术知识转移以及确定 CD:NGI 对数字图像规范的要求。该组织重视利益相关者的利益
和多波束声纳后向散射图像
(https://maps.ccom.unh.edu/portal/apps/webappviewer/index.html?id=28df035fe82c423cb3517295d9 bbc24c#. 2021 年 12 月 10 日) ........................................................................................................................... 20 图 19:R/V Gulf Surveyor (http://ccom.unh.edu/facilities/research-vessels/rv-gulf-surveyor)。 .......... 21 图 20:RVGS 图,其中包含关键位置和拖曳点相对于船舶参考点的偏移(未按比例绘制)。 ............................................................................................................................. 21 图 21:安装了拖缆的 R/V Gulf Surveyor 甲板上的 Klein 4K-SVY 侧扫。 ............................................................................................. 23 图 22:具有声学阴影、距离尺度、第一次回波和水柱的典型 SSS 数据示例。 ........................................................................................................................................................... 24 图 23:带有集成表面声速探头的 Kongsberg EM2040P MBES。 (https://www.kongsberg.com/maritime/products/ocean-science/mapping-systems/multibeam-echo- sounders/em-2040p-mkii-multibeam-echosounder-max.-550-m/) ........................................................................... 25 图 24:安装在 R/V Gulf Surveyor 中心支柱上的 EM2040P(照片:NOAA 的 Patrick Debroisse 中尉)。 ........................................................................................................................................... 26 图 25:在 50m 范围内布置用于位置置信度检查的 SSS 线。 ........................................................................... 27 图 26:相对于 MBES 目标位置(红色)的 SSS 接触位置(蓝色)。 ......................... 28 图 27:地理参考框架和船舶参考框架中的接触位置误差。接触位置主要位于 MBES 位置的东面。 ......................................................................... 28 图 28:应用地图校正后的 SSS 接触位置。 ......................................................................... 29 图 29:应用地图校正后,在地理和船舶参考框架中看到的 SSS 接触位置 ............................................................................................................................. 29 图 30:测量区域,其中 60m 和 80m 线路平面图以红色显示。 ........................................................................... 30 图 31:掩盖马赛克(左)隐藏接触,透过马赛克(右)显示接触。 ...... 32 图 32:使用自动所有数据,显示应用增益和定位校正之前的所有线路的 SSS 马赛克。覆盖在 RNC 13283 上。...................................................................................................... 33 图 33:使用 Auto-All 数据可视化应用地图校正和 EGN 后的 SSS。....... 34 图 34:DTM(顶部)显示折射伪影,与 ping 数据(底部)中看到的伪影相同。...................................................................................................................................................................... 35 图 35:EM2040P MBES 数据的全覆盖 DTM............................................................................................................. 36 图 36:EM2040P 数据从天底滤波到 45º 后的 DTM。............................................................................. 37 图 37:EM2040P 以 300 kHz 和 50cm 分辨率收集的 MBAB。西北采集点在左侧,东南采集点在右侧。后向散射强度以分贝表示,默认比例为 10 到 -70dB。 ........................................................................................................................... 38 图 38:调整后的 NW MBES 数据可视范围为 -4 至 -28db.................................... 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。........................................ 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。............................................................................................................. 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。............................................................................................. 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红色框突出显示了沙波应重叠的区域。............................................................................. 42 图 43:NW 采集站点:叠加之前的 MBES(顶部)、SSS(中)和 MBES 后向散射(底部)。 ........................................................................................................................................................... 44 图 44:SE 采集点:叠加前的 MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)。 ........................................................................................................................................... 45左侧为西北方向采集点,右侧为东南方向采集点。后向散射强度以分贝表示,默认范围为 10 至 -70dB。 ........................................................................................................................... 38 图 38:调整后的西北方向 MBES 数据可视范围为 -4 至 -28db........................................ 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。............................................................. 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。 .................................................................................................................... 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。 .................................................................................................................... 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红框突出显示了沙波应该重叠的区域。 ........................................................................... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45左侧为西北方向采集点,右侧为东南方向采集点。后向散射强度以分贝表示,默认范围为 10 至 -70dB。 ........................................................................................................................... 38 图 38:调整后的西北方向 MBES 数据可视范围为 -4 至 -28db........................................ 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。............................................................. 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。 .................................................................................................................... 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。 .................................................................................................................... 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红框突出显示了沙波应该重叠的区域。 ........................................................................... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45........... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45........... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45