XiaoMi-AI文件搜索系统
World File Search System60kHz
SGT40T120SDB4P7_数据表
L:超低开关,建议频率~2kHz;Q:低开关,建议频率2~20kHz;S:标准频率,建议频率5~40kHz;F:快速开关,建议频率10~60kHz;UF:超快速开关,建议频率40kHz~。
SGT75T65SDM1P4_DATASHEET
l:超低开关,建议频率〜2kHz;问:低开关,推荐频率2〜20kHz; S:标准频率,建议频率为5〜40KHz; F:快速开关,推荐频率10〜60kHz; UF:超快速开关,建议频率40kHz〜。
SGT60N60FD1PN/P7/PS/PT_数据表
L : 超低开关,建议频率~2KHz Q : 低开关,建议频率2~20KHz S : 标准频率,建议频率5~40KHz F : 快速开关,建议频率10~60KHz UF : 超快速开关,建议频率40KHz~
sgt40u120fdr1p7_datasheet
L : Ultra low switching, recommended frequency ~2KHz Q : Low switching, recommended frequency 2~20KHz S : Standard frequency, recommended frequency 5~40KHz F : Fast switching, recommended frequency10~60KHz UF : Ultra fast switching, recommended frequency 40KHz~
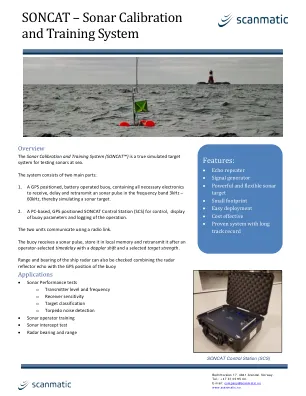
SONCAT – 声纳校准和训练系统
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位