XiaoMi-AI文件搜索系统
World File Search SystemADEPT
设计和开发熟练的健康参数系统
衡量脉搏氧饱和的系统是基于有关氧气和脱氧 - 脱氧蛋白状态的血液流量特征的两个想法。氧和脱氧 - 血红蛋白对红色和红外光的吸收彼此不同,组织中动脉血的体积随着每种心跳而异(Torp和Modi,2022)。使用脉搏血氧仪的使用是安全的,并且通常耐受。手指或脚趾甲床是最常使用的组织床。由于动脉饱和是医生最关心的,因此该机器的算法在动脉/毛细管组织床中搜索非常微小的动脉搏动。因此,在灌注不足或四肢运动不足的个体中,可能难以获得一个可靠的信号。在某些情况下,额头和耳垂(Agashe,2006年),鼻腔或嘴唇等其他应用位置已成功使用。
Adept 550 台式机器人用户指南
美国大陆境内。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 服务呼叫。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 应用问题。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 应用程序互联网电子邮件地址。。。。。。。。。。。。。。。。。。。。。。。。。.7 培训信息。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 在欧洲境内。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 法国 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.7 美国大陆或欧洲以外。。。。。。。。。。。。。。。。。。。。。。。。。.8 Adept 公告板服务 (BBS) 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.8 2 机器人概述 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。9
2021–22熟练计划模板最终043021
学区:提交日期计划:管理员提交计划的姓名:行政人员提交计划的职位/职位:电话号码:电子邮件地址:区域熟练联系人的名称:电话号码:电子邮件编号:电子邮件地址:如果与熟练的联系人不同,请与Sclead.org中的地区级别的Adept Adeptressorator。名称:电话号码:电子邮件地址:姓名:电话号码:电子邮件地址:区域特殊区域经理联系人联系:电话号码:电子邮件地址:学区提出了以下计划,以符合
ADEPT:一种适用于 GPU 架构的域独立序列比对策略
摘要背景:生物信息学工作流程经常使用自动基因组组装和蛋白质聚类工具。在大多数这些工具的核心中,执行时间的很大一部分用于确定两个序列之间的最佳局部比对。此任务使用 Smith-Waterman 算法执行,这是一种基于动态规划的方法。随着现代测序技术的出现以及基因组和蛋白质数据库的规模不断扩大,对更快的 Smith-Waterman 实现的需求应运而生。CPU 提供了多种 Smith-Waterman 算法的 SIMD 策略。然而,随着 HPC 设施向基于加速器的架构的转变,对高效的 GPU 加速策略的需求也随之而来。现有的基于 GPU 的策略要么针对特定类型的字符(核苷酸或氨基酸)进行了优化,要么仅针对少数应用用例进行了优化。结果:在本文中,我们提出了一种新的 GPU 架构序列比对策略 ADEPT,它与领域无关,支持来自基因组和蛋白质的序列比对。我们提出的策略使用 GPU 特定的优化,不依赖于序列的性质。我们通过实施 Smith-Waterman 算法并将其与类似的 CPU 策略以及每个领域中已知的最快 GPU 方法进行比较,证明了该策略的可行性。ADEPT 的驱动程序使其能够跨多个 GPU 进行扩展,并可以轻松集成到利用大规模计算系统的软件管道中。我们已经证明,基于 ADEPT 的 Smith-Waterman 算法在 Cori 超级计算机的单个 GPU 节点(8 个 GPU)上分别针对基于蛋白质和基于 DNA 的数据集展示了 360 GCUPS 和 497 GCUP 的峰值性能。总体而言,与相应的 SIMD CPU 实现相比,ADEPT 在节点到节点的比较中显示出 10 倍更快的性能。结论:ADEPT 表现出相当或更好的性能(下页继续)
未来流动性英国《自动车辆2024年法》 - 熟练
该法案单独或作为“类型”,为车辆授权提供了规定。车辆必须满足确定其UIC或NUIC名称的定义测试以及可以在其中操作的定义位置。该法案还创建了一个新的法律实体 - 授权的自动驾驶实体(ASDE),该实体是负责AV驾驶行为的授权组织中的人。该立法还描述了对UIC车辆的“过渡需求”,在这种情况下,在这种情况下,需要人类驾驶员才能接管控制权。
在...
光刺激(来自数字微型摩尔设备的2-D灯罩用固态CW激光照明)和两个光子成像仅限于不同的光学Z-Planes,可以通过分别翻译扩散器和主要目标来灵活,独立地调整这些光学Z-plan。 (底部)在光刺激和成像期之间交替(滚动)。每个红色条代表一个多光子成像的单一框架。光刺激和成像期交错。(b)显微镜示意图。dm,二分色镜。dmd,数字微型摩尔设备。i,虹膜膜片。L1-L12,镜头。o,主要目标。PMT,光电倍增管。PS,潜望镜。s,快门。SM,扫描镜子。(c)(顶部)使用可移动扩散器将图案化的光刺激和多光子成像平面解)的例证。以4F镜头配置将扩散器成像成样品中;沿光路的扩散器转换会导致相应的投影平面轴向移动。OFP,客观焦平面。 PSP,光刺激平面。 (d)DMD芯片到CCD摄像头到2P显微镜注册。 我们注册了DMD刺激场(DMD像素尺寸= 2.4 µm,样品 1d)至148OFP,客观焦平面。PSP,光刺激平面。(d)DMD芯片到CCD摄像头到2P显微镜注册。我们注册了DMD刺激场(DMD像素尺寸= 2.4 µm,样品1d)至148(i)两个光子显微照片,分别为10 µm荧光微粒;箭头标记了两个微粒,这是较大的DMD调节投影靶模式(8 microbeads)的一部分,它们被视为受托点; (ii)更大的视野(包括目标微头)的广阔场荧光图像(全场照明); (iii)从2p图像中选择的ROI用于生成DMD-Chip灯罩;这些进一步投影在主要的客观焦平面上,并使用主CCD摄像头(CCD 1)成像; (iv)DMD生成的照片刺激口罩和(II)中10 µm微粒的宽场荧光图像的覆盖层;请注意,荧光仅限于由DMD光刺激掩模靶向的微粒,并具有最小的溢出到相邻(靶)的微粒(请参阅信托标记)。

实现全新创新的低成本火星科学
- 在抵达行星之前,太空运输过程中的任何时间都可以部署进入 • ADEPT 开发专注于进入金星作为延伸目标。由于进入条件更温和(例如金属肋条、碳纤维织物层数更少),火星 EDL 的使用风险较低 • ADEPT 的碳纤维织物气动热能力允许更陡峭的火星进入轮廓(更高的加热),从而减少着陆分散足迹 • 低弹道系数设计可以消除高风险的 EDL 事件(例如超音速降落伞)
四图表 - 海军蓝 STP
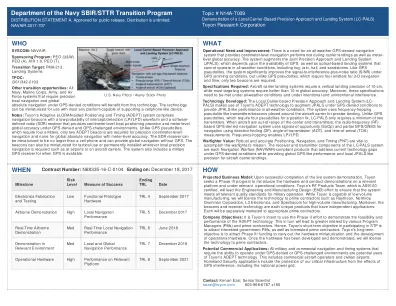
注释:Toyon 的自适应 eLORAN 辅助定位和授时 (ADEPT) 系统包括具有低截获/检测概率 (LPI/LPD) 波形的导航信标和软件定义无线电 (SDR) 接收器,该接收器可在 GPS 拒绝和 GPS 挑战环境下提供厘米级本地定位精度和米级全球精度。与需要四个发射器的 GPS 伪卫星不同,精确(厘米级)导航只需要两个 ADEPT 信标,而米级精度的全球绝对导航则不需要。SDR 接收器可以缩小到不超过手机大小,并且可以在没有 GPS 的情况下提供全球导航。信标还可以缩小以用于战术用途或永久安装在需要本地精确导航的任何地方,例如机场或航空母舰上。该系统还包括一个军用 GPS 接收器,用于 GPS 可用时。

轴向脱钩的光刺激和两个光子读数(Adept)用于映射神经回路的功能连通性
摘要:宿主免疫系统的体内平衡受白细胞的调节,其中有8种细胞表面受体用于细胞因子。趋化性细胞因子(趋化因子)激活其受体9,以唤起稳态迁移或炎症条件下的免疫细胞的趋化性,即炎症组织或病原体。免疫系统的失调导致11种疾病,例如过敏,自身免疫性疾病或癌症,需要有效,快速作用的药物,以最大程度地减少慢性炎症的12种长期影响。在这里,我们进行了基于结构的虚拟筛选13(SBV),由KERAS/Tensorflow神经网络(NN)辅助,以查找在三个趋化因子受体上作用的新型化合物支架14:CCR2,CCR3和一个CXC受体CXCR3。keras/tensorflow 15 nn在这里不是用作典型使用的二进制分类器,而是作为有效的多级分类器16,不仅可以丢弃非活性化合物,而且还可以丢弃低或中等活性化合物。在100 ns全原子分子动力学中测试了SBV和NN提出的几种化合物,以确认其结合亲和力。为改善化合物的基本结合亲和力,提出了新的19种化学修饰。将修饰的化合物与这三个趋化因子受体的已知20个雄鹿主义者进行了比较。已知的CXCR3是预测的21磅,因此在基于结构的方法中显示了在药物发现中使用Keras/Tensorflow的好处。此外,我们表明KERAS/Tensorflow NN可以预测化合物的受体亚型选择性,SBV通常会失败。我们跨越了24个测试的趋化因子受体数据集,这些数据集从Chembl和策划的大麻素25受体中策划的数据集获取,网址为:http://db-gpcr-chem.uw.edu.pl。在从Chembl检索的大麻素26受体数据集上训练的NN模型是受体亚型选择性27预测中最准确的。在趋化因子受体数据集训练的NN模型中,CXCR3模型28在区分给定化合物数据集的受体亚型方面表现出最高的精度。29
