XiaoMi-AI文件搜索系统
World File Search SystemAHS


2020-2025战略计划序言
应用健康科学学院拥有丰富的历史和许多资产,可将其定位为持续增长和成功,以推进教学,学习,发现和宣传/参与的计划。ahs可以追溯到1895年,当时伊利诺伊大学首次建立了男女体育锻炼系。从那时起,学院就已经扩展到三个学术部门和两个单位。多年来,有远见的行政人员,世界一流的教职员工以及杰出的员工和学生的综合贡献已导致伊利诺伊大学被公认为是美国最残疾最友好的校园。我们的单位本质上是跨学科的,使我们能够解决紧迫的社会问题,以改善个人,家庭,社区和组织的健康和福祉,并倡导残疾人在社会中的全面参与。我们的战略计划将通过对学生的体验学习,促进跨AHS单位和整个校园的跨学科研究合作来促进教育卓越和发现,并提高我们的外展和参与活动的影响和可见性,同时保持财务状况良好。

本周临床药理学和毒理学精选
临床药理学医师咨询服务时间为周一至周五,上午 8 点至下午 5 点。值班医师在 AHS Insite 页面上的 ROCA 中列出。临床药理学咨询也可通过 Netcare 电子转诊流程和 Specialist Link 获得。我们的服务也在 Alberta Referral Directory 中列出。单击此处了解有关该服务的更多详细信息。
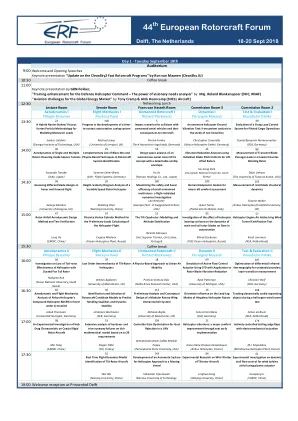
第 44 届欧洲旋翼机论坛
AHS 最佳论文奖;Michael Zimmermann 先生(DLR)撰写的“在接近过程中避开障碍物:DVE 缓解飞行试验及其他” ARF 最佳论文奖;Hideaki Sugawara 先生(JAXA)撰写的“复合直升机高速飞行时旋翼/机翼气动相互作用研究”
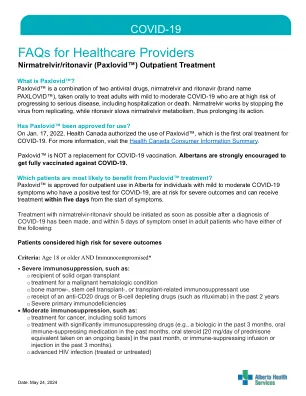
if-ppih-covid-19-paxlovid-faq-hcw.pdf
1 如果透析患者体重 < 40 公斤,则应将剂量减少至第 1 天 150 毫克尼玛瑞韦 + 100 毫克利托那韦,然后每 48 小时 150 毫克尼玛瑞韦 + 100 毫克利托那韦,再服用 2 剂,透析后服用。如何识别和通知高危患者?属于高危类别的患者将收到来自 AHS 的短信信息,如果他们进行了实验室确认的检测,AHS 将通知他们 COVID-19 检测结果呈阳性。或者,如果患者在家中通过快速抗原检测检测呈阳性,他们可以联系他们的初级保健医生或访问 ahs.ca/covidopt 了解更多信息。如果患者被认为适合并有兴趣接受治疗,但不适合接受 Paxlovid 治疗(如 ahs.ca/covidopt 所述),可拨打专线 1-844-343-0971 留言。工作人员将回电询问一些初步筛查问题,并将患者转介给门诊治疗计划的医生,由医疗保健专业人员确定是否适合其他治疗方案。
埃德蒙顿地区应对策略
个人防护装备使用、更换和处置的 AHS 指南摘要 ...................................................................................................................................... 2 访问...................................................................................................................................................................... 3 重新订购个人防护装备 ...................................................................................................................................................... 4 服务提供商收到未订购的个人防护装备时的处理 ...................................................................................................... 5 退货...................................................................................................................................................................... 5 PPE 成本 ...................................................................................................................................................................... 5 在发生短缺时支持其他服务提供商的流程 ............................................................................................................. 5 与集体生活环境和为残障服务个人提供的其他服务相关的信息 ............................................................................................. 5
优化腌制溶液以改善高级高强度钢的磷酸性
摘要:这项研究研究了使用表面分析和电化学测量值改善晚期高强度钢(AHS)的磷酸性的最佳腌制条件。要删除在AHS表面形成的SIO 2,将30wt。%NH 4 HF 2添加到腌制溶液中,从而显着减少AHSS表面上的SIO 2的数量。使用腌制溶液中的HNO 3浓度高于13%,可显着提高磷酸性。此外,用基于HNO 3的溶液而不是基于HCl的溶液腌制后,磷酸盐晶体变得更加细致。电化学阻抗光谱(EIS)的数据表明,经受HNO 3的腌制的AHSS的耐腐蚀性高于基于HCl的腌制的AHSS。参与磷酸盐处理过程的氟化合物仅在基于HNO 3的溶液中形成钢表面。F与磷酸盐溶液反应的F化合物增加了大量溶液的pH值,从而大大提高了磷酸性。由于磷酸盐结构的结束和表面粗糙度的增加,在基于HNO 3的条件下,磷酸性比基于HCl的条件更好。

确认的心力衰竭初级保健途径
eplerenone限制:仅使用eplerenone for:1。入院前的eplerenone患者;或2。患有纽约心脏协会(NYHA)的患者II类慢性心力衰竭(HF),左心室收缩功能障碍(LVSD)等于或小于35%,并且对螺旋蛋白不易于且对螺旋酮不易于抑制剂(sglt2i) *empagliflozin和canagliflozin当前不在此指示的AHS格式上Dapagliflozin Hfref&hfpef

肺炎球菌结合物 20 (PNEU-C20) 疫苗
本版权作品根据 Creative Commons Attribution-NonCommercial-NoDerivative 4.0 International 许可证获得许可。要查看此许可证的副本,请参阅 https://creativecommons.org/licenses/by-nc-nd/4.0/。您可以自由复制和分发作品,包括以其他媒体和格式用于非商业目的,只要您将作品归属于 Alberta Health Services,不改编作品,并遵守其他许可条款。该许可证不适用于 Alberta Health Services 不是版权所有者的 AHS 商标、徽标或内容。