XiaoMi-AI文件搜索系统
World File Search SystemATMEGA
高级研究和研究系
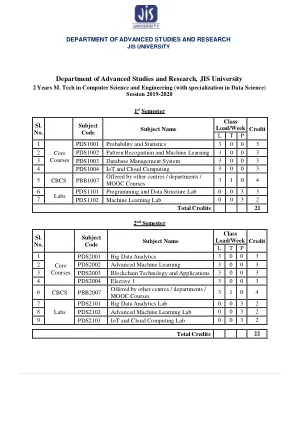
模块3:IOT设备简介:RPI硬件详细信息:PIN插图,GPIO内部电路,替代功能引脚电路,RPI的详细硬件规格。Arduino Uno硬件详细信息:Atmega 328p,数字I/O引脚,PWM数字I/O引脚,模拟输入引脚,DC,当前输入引脚,SRAM,SRAM,EEPROM。带有ESP8266开发套件的节点MCU固件:ESP 8266带有TCP/IP协议的WiFi模块,ESP8266的Auduino IDE。与ESP8266接口。Raspberry Pi Setup and Administration: OS LOADING, Post boot configuration, SSH Configuration, Serial Console on Rpi, Wiring Pi,I2c,SPI setup, DHCP server and DHCP client configuration, Wi- Fi Configuration, IP Configuration, Port Forwarding On RPi

ATmegaS64M1 微控制器
Microchip 的 ATmegaS64M1 AVR ® 微控制器 (MCU) 将具有 CAN 功能的汽车领先 AVR 内核带入航空航天行业。ATmega S64M1 MCU 专为关键航空航天应用而设计,具有增强的辐射、扩展的温度和更高的可靠性。它利用了成熟的 Microchip 工具,这些工具已在全球大众市场的设计中使用。CAN 控制器、功率级控制器、ADC、DAC 和模拟比较器使 ATmegaS64M1 微控制器成为许多最常见的空间应用的绝佳选择,这些应用通常需要较小的占用空间和较低的功耗,例如电机控制和远程终端单元。

用太阳能驱动的电动汽车移动性
本文档提供了针对电动汽车的太阳能充电系统的计划和设计过程的全面概述。这种创新的解决方案通过利用太阳能解决了昂贵的汽油和有害排放的问题。随着采用电动汽车的国家数量不断增加,这种充电基础设施为传统燃料提供了具有成本效益的替代品。通过合并太阳能电池板,电池,变压器,调节器电路,铜线圈,AC到DC转换器,ATMEGA控制器和LCD显示屏,该系统允许电动汽车在运动中充电,从而消除了对充电站进行频繁停止的需求。这项技术展示了电动汽车的道路集成,太阳能无线充电系统的可行性。

家用自动太阳能植物浇水系统
摘要 本文介绍了一种自动太阳能植物浇水系统的开发,该系统将帮助那些难以找到足够时间灌溉植物的家庭园丁。该系统使用 DHT11 湿度温度传感器和土壤湿度传感器监测周围的种植园和植物下方的土壤状态。利用 Arduino IDE 程序,Arduino Uno R3 (Atmega 328p) 接收来自这些传感器的读数以确定植物的状态。为了确定植物是否获得足够的水并调节水泵进行灌溉,Arduino IDE 程序计算传感器值并确定土壤条件是高于还是低于阈值。要使自动植物浇水系统发挥作用,需要一个五伏太阳能电池板和一个 MPPT 充电控制器。DHT11 传感器和土壤湿度传感器的推荐范围在文章中有明确说明和记录。关键词:植物浇水、浇水系统、太阳能、家庭园艺、嵌入式系统

使用地面电台监控单元的四轮驱动器的设计和开发
2尼日利亚克罗斯河科技大学物理学系摘要 - 在这项研究中,描述了Quadcopter的开发。这表明利用构建软件用于构建发射器和接收器电路,并且该机柜是在本地生产的。由于经常发生的邪教战斗和流血事件,这已成为卡拉巴尔的克罗斯河科技大学校园中的问题,因此需要进行翻新。使用四轮驱动器,为该项目捕获了一些学生和一些热点位置的图像。这个四轮驱动器的组件包括一个小的F450,由玻璃纤维,四个Hubson X4拉丝DC电动机带有Walkera Ladybird Propellers,一个电子速度控制(ESC),一个NANO NANO NANO NRF24L01模块,一个惯性测量单元(IMU)MPU 6050,MPU 6050,lipo powder, 使用MATLAB模拟了从UAV收集的数据。 这些发现与印度电子与传播学院旁遮普邦的可爱专业大学相当可比。 在他们的研究中,创建了一个四肢驱动器,其明确目的是获取有关大气二氧化碳的信息。 我们的四轮飞机的飞行时间只有大约四分之三小时,它只能达到约150米的垂直高度,而他们的GPS模块可以正确稳定,可以根据其GPS模块来稳定位置,可以确定其位置,可以达到700米的垂直高度,并且飞行时间超过4小时。 索引术语 - 四轮驱动器,拉丝直流电动机,ESC,MPU 6050,Lipo电池,螺旋桨,无人机MATLAB。使用MATLAB模拟了从UAV收集的数据。这些发现与印度电子与传播学院旁遮普邦的可爱专业大学相当可比。在他们的研究中,创建了一个四肢驱动器,其明确目的是获取有关大气二氧化碳的信息。我们的四轮飞机的飞行时间只有大约四分之三小时,它只能达到约150米的垂直高度,而他们的GPS模块可以正确稳定,可以根据其GPS模块来稳定位置,可以确定其位置,可以达到700米的垂直高度,并且飞行时间超过4小时。索引术语 - 四轮驱动器,拉丝直流电动机,ESC,MPU 6050,Lipo电池,螺旋桨,无人机MATLAB。

引用方式:Mutinda, M.、Munji, K. 和 Nyenge, L. (2023)。基于锁相环的宽带低噪声信号发生器的实现。Afr
信号发生器是一种用途广泛的重要电子测试仪器,可用于蜂窝通信、雷达系统、微带天线和电子实验室等各个领域。本研究重点是模拟和设计工作频率范围为 35 MHz 至 3 GHz 的低相位噪声信号发生器。为此,使用 Arduino 板上的 Atmega 328P 微控制器来控制基于锁相环 (PLL) 概念的合成器。评估了信号发生器的性能,特别强调预测和分析 PLL 组件产生的相位噪声。为确保系统稳健,设计了三阶环路滤波器以有效抑制杂散。通过使用 ADIsimPLL 仿真工具进行仿真,获得了环路带宽 (10 kHz) 和相位裕度 (45°) 的最佳值。为此实现所选的锁相环芯片是 ADI 公司生产的 ADF4351。通过进行瞬态分析,确定了 PLL 系统从最小输出频率过渡到最大输出频率所需的时间。此外,使用阴极射线示波器研究了 35-100 MHz 频率范围内的发生器信号特性,并使用频谱分析仪研究了 101-3000 MHz 频率范围内的发生器信号特性。计算了不同频率(35 MHz、387 MHz、1 GHz、2 GHz 和 2.9 GHz)下的相位噪声水平,并在不同的偏移量(1 kHz、10 kHz、100 kHz 和 1 MHz)下进行了分析。相比之下,实验结果表明相位噪声水平高于通过模拟获得的结果。值得注意的是,随着输出频率的增加,相位噪声也相应增加。

材料科学的人工智能
自动化的导向车辆(AGV)在各个研究领域都起着至关重要的作用。我们的项目旨在增强人类的视觉系统并开发智能机器。AGV广泛用于工业领域,社区服务和危险工作环境中。他们在我们的日常生活中具有许多优势,使他们能够像机器人一样感知和对环境做出反应。考虑到它们的广泛使用,我们开发了一个AGV的原型,该原型使用两个DC电动机和一个freewheel遵循平坦表面上的预定路径。相机连接到PC,以通过MATLAB进行图像采集和处理。GUI应用程序允许用户确定路径,而RF模块可以在PC和MicroController之间进行通信。我们可以根据车辆的位置从PC发送命令,然后按照指示向前,向左,右或停止。这项研究旨在利用医疗保健部门的机器人技术来增强残疾人的流动性。该项目涉及开发一个机器人系统,该机器人系统可以跟踪和导航各种环境,包括工业领域,仓库,医疗设施以及人类无法运作的地区。所提出的系统由三个主要组件组成:机器人组件,PC和GUI应用。机器人组件包括Atmega 16A微控制器,电机驱动器电路(L293D),RF模块(CC2500),IR传感器和USB摄像头。PC将从GUI应用程序接收命令,并通过RF模块向机器人组件发送信号。基于IR的传感器用于障碍物检测。系统的功能框图说明了摄像机如何使用阈值捕获车辆路径的鸟眼视图图像,并使用阈值检测车辆上的红色条并跟踪其运动。GUI应用程序允许用户追踪路径,而微控制器识别PC中的命令并控制机器人的运动(向前,左或右)。电路图显示了两个主要部分:机器人组件和PC。机器人组件采用带电机驱动器电路的Atmega 16A微控制器,用于隔离高功率电动机。RF模块CC2500使用串行协议操作,并连接到微控制器的TX和RX引脚。该系统的算法涉及初始化微控制器,USART和电机;从USB摄像头获取图像;处理图像;跟踪位置;向机器人组件发送信号;并在各自的方向上移动机器人。原型实施证明了在各个领域中使用AGV的可行性,包括工业环境,仓库,医疗设施和人类无法运作的危险区域。参考:1。R.C. Arkin和R.R. Murphy,“制造环境中的自动导航”,IEEE Int。 conf。 机器人和自动化,1997年,pp。 2312-2317。 2。 K. Schilling,M。Mellado-Arteche,J。Garbajosa和R. Mayerhofer,“用于工业生产的灵活自动运输机器人的设计”,《 Proc》。 ieee int。 sammp。 工业电子(ISIE'97),第1卷。R.C.Arkin和R.R.Murphy,“制造环境中的自动导航”,IEEE Int。conf。机器人和自动化,1997年,pp。2312-2317。2。K. Schilling,M。Mellado-Arteche,J。Garbajosa和R. Mayerhofer,“用于工业生产的灵活自动运输机器人的设计”,《 Proc》。ieee int。sammp。工业电子(ISIE'97),第1卷。在1997年,纽约纽约发行了一份出版物,涉及从第791页到796。一份题为“自动导向车辆的同时调度和无冲突路线的动态优化”的研究论文发表在2010年的高级机械设计,系统和制造杂志上。另一项研究是“自动制造系统的过程与以资源为导向的Petri净建模”,由N. Wu和M. Zhou进行,出现在2010年5月的《亚洲控制杂志》中。本文讨论了与AGV词典中与AGV相关的框图。
设计基于太阳能电动汽车充电系统
1 Chaitanya Bharathi技术研究所,海得拉巴2摄影法,海德拉巴摘要Chaitanya Bharathi技术研究所副教授:用于电动汽车充电的太阳能动力系统,解决了用于电动汽车的充电,解决了燃料消耗和环境污染的主要问题。电动汽车已在全球引入,并且正在逐渐受欢迎。除了其环境优势之外,EV通过用电代替燃料而降低了旅行成本,这显然是负担得起的我们引入了一种创新的电动汽车充电系统,从而彻底改变了充电过程。与需要物理连接的传统方法不同,我们的系统使车辆在不需要电缆的情况下在运动时充电。通过利用太阳的力量,我们开发了一种太阳能系统,可以消除对外部电源的依赖。这种开创性的技术结合了LCD显示器,Atmega控制器,铜管线圈,AC-DC转换器,太阳能电池板,电池,变压器和调节器电路。此复杂的组装允许无线能量转移到电动汽车上,从而消除了充电停止的不便。因此,我们的系统无缝集成到现有的道路基础设施中,为电动汽车充电提供了可持续且高效的解决方案。这种充电技术的范式变化提供了许多优势。驾驶员可以享受不间断的旅程而不会焦虑,因为车辆不断补充能源供应。此外,太阳能的利用可促进清洁能源消耗,并减少对化石燃料的依赖。通过将无线充电与可再生能源相结合,我们为更绿色,更可持续的运输生态系统做出了贡献。该系统具有加速电动汽车采用并推动电动移动性关键词的进步:电动汽车,电动力量,无线电源传输,效率,动态充电,直流电流。