XiaoMi-AI文件搜索系统
World File Search SystemBroyden
使用 qBang 优化变分量子算法
变分量子算法 (VQA) 代表了一种利用当前量子计算基础设施的有前途的方法。VQA 基于通过经典算法在闭环中优化的参数化量子电路。这种混合方法减少了量子处理单元的负载,但代价是经典优化会产生平坦的能量景观。现有的优化技术,包括虚时间传播、自然梯度或基于动量的方法,都是有前途的候选方法,但要么给量子设备带来沉重的负担,要么经常遭受收敛速度缓慢的困扰。在这项工作中,我们提出了量子 Broyden 自适应自然梯度 (qBang) 方法,这是一种新颖的优化器,旨在提炼现有方法的最佳方面。通过采用 Broyden 方法近似 Fisher 信息矩阵中的更新并将其与基于动量的算法相结合,qBang 降低了量子资源需求,同时比资源要求更高的替代方案表现更好。荒原、量子化学和最大切割问题的基准测试表明,在以下情况下,其整体性能稳定,并且比现有技术有明显改进

基于语法进化的偏瘫类型检测的特征提取
摘要:偏瘫是由脑损伤引起的疾病,并影响了人口的显着百分比。患有这种疾病的患者的影响是体内的左侧或右侧的无力,痉挛和运动障碍。本文提出了一种基于径向基础功能(RBF)网络的语法演化(GE)的自动特征选择和构造方法,该网络可以对患者和健康个体之间的偏瘫类型进行分类。所提出的算法在包含Rehagait移动步态分析系统加速度计传感器的数据集中进行了测试,这些算法放置在各种患者身体部位。收集的数据分为2秒的窗口,并进行了手动预处理和功能提取阶段。然后,将提取的数据作为对基于GE的方法的输入表示,以创建新的,更有效的特征,然后将其作为RBF网络的输入引入。本文的实验部分涉及通过四种分类方法测试所提出的方法:RBF网络,多层感知器(MLP)接受了Broyden-Fletcher – Fletcher – Goldfarb – Shanno(BFGS)培训算法,支持Vector Machine(SVM)和GE基于GE的Parellitiation(GEL)工具(GICIFIT)工具(GICIFIT)工具。测试结果表明,与其他四种方法相比,所提出的解决方案具有最高的分类精度(90.07%)。
研究论文 以建筑绘画为例人工智能技术在美术教学中的应用
在当今的科技时代,人工智能发展迅速,已在各个领域确立了存在。人工智能的目的是减少人为干预,以更好的结果完成任务。在本研究中,我们将以建筑绘画为例,研究人工智能技术在艺术教学中的应用。建筑绘画是一种只关注建筑的绘画,包括建筑物的室内和室外景观。在早期阶段,建筑仅出现在以不同物体为主要主题的绘画背景中。后来,建筑本身成为绘画领域的主流流派。正如其他研究人员所表明的那样,互联网技术、无线传感器网络(WSN)和深度学习技术等人工智能等最新技术都已部署在艺术教学中。人工智能使教学变得更容易。本系统利用互联网技术、WSN、人工智能和轻量级深度学习模型在艺术教学领域。通过采用这项新技术,教学方法得到了增强。为了对所提出的系统进行分析,实施了有限 Broyden-Fletcher-Goldfarb-Shanno (L-BFGS) 艺术算法。该 L-BFGS 算法专注于在任何给定应用中寻找局部最小值。在建筑绘画艺术教学中,所提出的算法将有助于解释在创作艺术品时需要注意的细微工作。然后将所提出的算法与传统的梯度下降、Adam 和 Adadelta 算法进行比较。从结果可以看出,所提出的算法在训练和测试阶段分别实现了 97% 和 98% 的准确率。
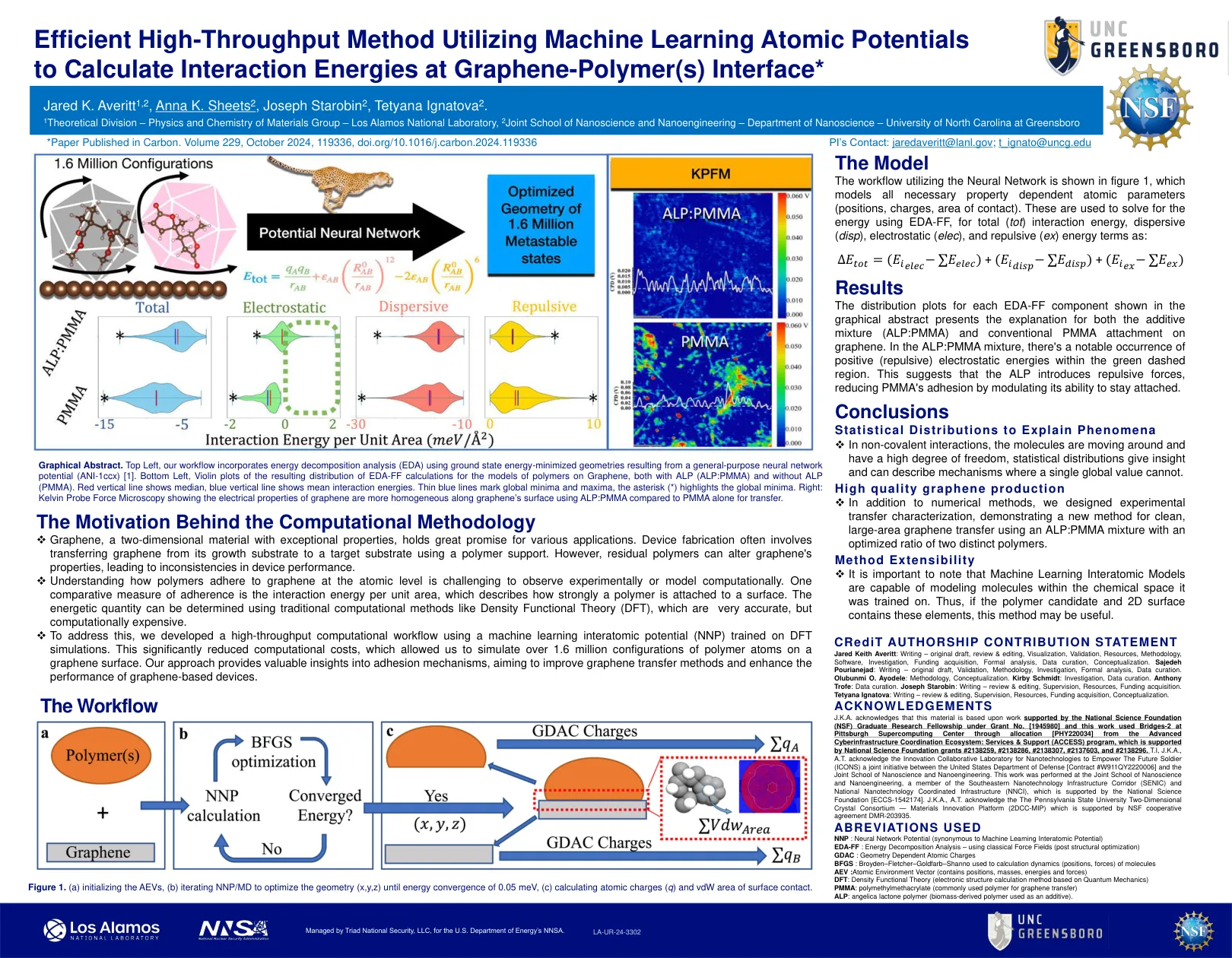
有效的高通量方法利用机器学习原子电位来计算石墨烯 - 聚合物接口的相互作用能量*
信用撰稿人贡献声明Jared Keith Averitt:写作 - 原始草案,评论,可视化,验证,资源,方法,软件,调查,资金获取,正式分析,数据策划,概念化,概念化。sajedeh pourianejad:写作 - 原始草稿,验证,方法论,调查,正式分析,数据策划。Olubunmi O. Ayodele:方法论,概念化。柯比·施密特(Kirby Schmidt):调查,数据策划。Anthony Trofe:数据策划。Joseph Starobin:写作 - 评论和编辑,监督,资源,资金获取。 Tetyana Ignatova:写作 - 审查和编辑,监督,资源,资金获取,概念化。 致谢J.K.A. 承认,该材料基于国家科学基金会(NSF)研究生研究奖学金的工作, [1945980]和这项工作在匹兹堡超级计算中心使用了桥梁-2通过分配[PHY220034],来自高级网络网络基础结构协调生态系统:服务与支持(访问)计划,由国家科学基金会#2138259,#2138259,#2138286,21386,#2133330,及#21333303.60,由国家科学基金会支持 T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。 图1。Joseph Starobin:写作 - 评论和编辑,监督,资源,资金获取。Tetyana Ignatova:写作 - 审查和编辑,监督,资源,资金获取,概念化。致谢J.K.A.承认,该材料基于国家科学基金会(NSF)研究生研究奖学金的工作,[1945980]和这项工作在匹兹堡超级计算中心使用了桥梁-2通过分配[PHY220034],来自高级网络网络基础结构协调生态系统:服务与支持(访问)计划,由国家科学基金会#2138259,#2138259,#2138286,21386,#2133330,及#21333303.60,由国家科学基金会支持T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。 图1。T.I,J.K.A.,A.T。承认纳米技术的创新合作实验室赋予未来士兵的权力(ICONS),美国国防部[合同#W911QY2220006]与纳米科学和纳米工程联合学校之间的共同计划。图1。这项工作是在纳米科学和纳米工程联合学校进行的,东南纳米技术基础设施走廊(SENIC)和国家纳米技术协调基础设施(NNCI)的成员,该基础设施(NNCI)得到了国家科学基金会[ECCS-1542174]的支持。J.K.A.,A.T。承认宾夕法尼亚州立大学二维水晶财团 - 材料创新平台(2DCC-MIP),该平台得到了NSF合作协议DMR-203935的支持。 使用NNP:神经网络潜力(机器学习的同义原子间潜在的同义)EDA-FF:能量分解分析 - 使用经典力场(结构优化后)GDAC:依赖性原子电荷BFGS:BROYDEN – FLOYDEN – FLOYDER-GLETCHER – FLETCHER-GOLDCHER-GOLDFARB – SHANNO ATSIS ATSIS ENTICAL DYMANSSSSSSSSSSS, (包含位置,质量,能量和力)DFT:密度功能理论(基于量子力学的电子结构计算方法)PMMA:聚甲基甲基丙烯酸酯(用于石墨烯转移的常用聚合物)ALP:Angelica Lactone Polymer(用于添加剂的生物量聚合物)。 (a)初始化AEV,(B)迭代NNP/MD优化几何(X,Y,Z),直到能量收敛为0.05 MeV,(C)计算表面接触的原子电荷(Q)和VDW面积。J.K.A.,A.T。承认宾夕法尼亚州立大学二维水晶财团 - 材料创新平台(2DCC-MIP),该平台得到了NSF合作协议DMR-203935的支持。使用NNP:神经网络潜力(机器学习的同义原子间潜在的同义)EDA-FF:能量分解分析 - 使用经典力场(结构优化后)GDAC:依赖性原子电荷BFGS:BROYDEN – FLOYDEN – FLOYDER-GLETCHER – FLETCHER-GOLDCHER-GOLDFARB – SHANNO ATSIS ATSIS ENTICAL DYMANSSSSSSSSSSS, (包含位置,质量,能量和力)DFT:密度功能理论(基于量子力学的电子结构计算方法)PMMA:聚甲基甲基丙烯酸酯(用于石墨烯转移的常用聚合物)ALP:Angelica Lactone Polymer(用于添加剂的生物量聚合物)。(a)初始化AEV,(B)迭代NNP/MD优化几何(X,Y,Z),直到能量收敛为0.05 MeV,(C)计算表面接触的原子电荷(Q)和VDW面积。
面向线状柔性物体的机器人操作研究进展与展望
此类任务同样可以先离线学习状态转移预测模 型再使用 MPC 计算控制输入 [28-29] ,或直接使用强 化学习方法 [68-69] ,但需要大量训练数据且泛化性较 差。在准静态的局部形变控制中,更常用的方法是 在线估计局部线性模型。该模型假设线状柔性体形 状变化速度与机器人末端运动速度在局部由一个雅 可比矩阵 JJJ 线性地联系起来,即 ˙ xxx ( t ) = JJJ ( t ) ˙ rrr ( t ) ,其 中 ˙ xxx 为柔性体形变速度, ˙ rrr 为机器人末端运动速度。 由于使用高频率的闭环反馈来补偿模型误差,因此 完成任务不需要非常精确的雅可比矩阵。 Berenson 等 [70-71] 提出了刚度衰减( diminishing rigidity )的概 念,即离抓取点越远的位置与抓取点之间呈现越弱 的刚性关系,并据此给出了雅可比矩阵的近似数学 表示。此外,常用的方法是根据实时操作数据在线 估计雅可比矩阵,即基于少量实际操作中实时收集 的局部运动数据 ˙ xxx 和 ˙ rrr ,使用 Broyden 更新规则 [72] 、 梯度下降法 [73] 、(加权)最小二乘法 [33-34,74] 或卡尔 曼滤波 [75] 等方法在线地对雅可比矩阵进行估计。 该模型的线性形式给在线估计提供了便利。然而, 雅可比矩阵的值与柔性体形状相关,因此在操作 过程中具有时变性,这使得在线更新结果具有滞 后性,即利用过往数据更新雅可比矩阵后,柔性体 已经移动至新的形状,而新形状对应的雅可比矩阵 与过往数据可能并不一致。同时,完整估计雅可比 矩阵的全部元素需要机器人在所有自由度上的运 动数据,这在实际操作过程中难以实现,为此一些 工作提出根据数据的奇异值进行选择性更新或加 权更新 [74] 。此外,此类方法需要雅可比矩阵的初 值,一般在操作前控制机器人沿所有自由度依次运 动,收集数据估计初始位置的雅可比矩阵。受上述 问题影响,在线估计方法往往仅适用于局部小形变 的定点控制,难以用于长距离大形变的轨迹跟踪。 Yu 等 [31] 提出 ˙ xxx = JJJ ( xxx , rrr ) ˙ rrr 的模型形式,其中 JJJ ( · ) 为 当前状态至雅可比矩阵的非线性映射,待估计参数 为时不变形式。基于该模型,该方法将离线学习与 在线更新无缝结合,实现了稳定、平滑的大变形控 制。 Yang 等 [76-77] 使用模态分析方法建立柔性体模