XiaoMi-AI文件搜索系统
World File Search SystemCanny

基于直方图特征提取和Canny边缘
阿尔茨海默病 (AD) 越来越影响老年人,是 65 岁以上人群的主要杀手。不同的深度学习方法用于自动诊断,但它们也存在一些局限性。深度学习是用于检测和分类医学图像的现代方法之一,因为深度学习能够自动提取图像的特征。然而,使用深度学习准确分类医学图像仍然存在局限性,因为提取医学图像的精细边缘有时被认为是困难的,并且图像中存在一些失真。因此,本研究旨在开发一种计算机辅助脑部诊断 (CABD) 系统,该系统可以判断脑部扫描是否显示出阿尔茨海默病的迹象。该系统采用 MRI 和特征提取方法对图像进行分类。本文采用阿尔茨海默病神经影像学计划 (ADNI) 数据集,包括用于阿尔茨海默病患者识别的功能性 MRI 和正电子版本断层扫描,这些扫描是为阿尔茨海默病患者和典型个体制作的。所提出的技术利用 MRI 脑部扫描来发现和分类特征,利用直方图特征提取 (HFE) 技术与 Canny 边缘相结合来表示卷积神经网络 (CNN) 分类的输入图像。此策略跟踪图像中梯度方向的实例。实验结果为 ADNI 图像分类提供了 97.7% 的准确率。

应用的改进的智慧边缘检测用于诊断人脑肿瘤的医学图像
医疗图像处理已成为诊断过程的关键要素之一,因为最近医疗成像的使用增加,而临床医生在诊断患者中对这种计算机处理的医学图像的依赖。由于传统的Canny Edge检测算法对噪声很敏感,因此在滤除噪声时会很容易丢失弱边缘信息,并且其固定参数的适应性差。建议的算法引入了图像块强度操作员的概念,以替换图像梯度。此外,建议的算法的计算速度相对较快,因为它可以通过块而不是像素来构图,而不是像素。提出了两种自适应阈值选择方法,一种基于图像梯度幅度的中值累积直方图,另一个基于两种类型的图像像素的标准偏差(一个具有较小的边缘信息,另一个带有丰富的边缘信息)。所提出的算法可以分为四个阶段:输入医学数字图像,将颜色的医学图像转换为灰度,应用改进的Canny Edge检测,然后计算MSE&PSNR测量,此外,肿瘤学家进行了视觉问卷,以找出使医疗图像增强的方法清晰。
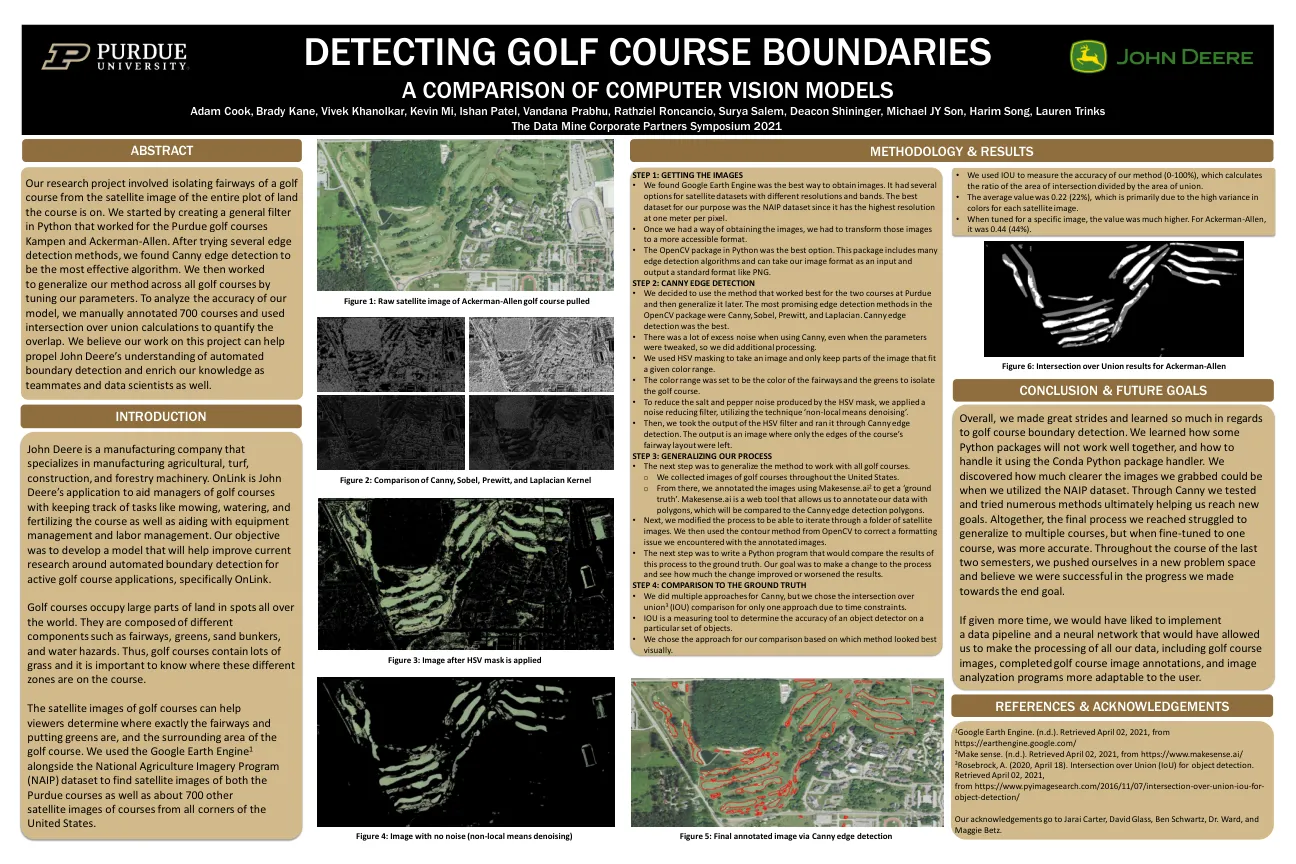
计算机视觉模型的比较
步骤1:获取图像•我们发现Google Earth Engine是获取图像的最佳方法。它有几种具有不同分辨率和频段的卫星数据集的选项。最适合我们目的的数据集是NAIP数据集,因为它的分辨率最高,每个像素为1米。•一旦我们有了获得图像的方法,我们就必须将这些图像转换为更容易访问的格式。•Python中的OpenCV软件包是最好的选择。此软件包包括许多边缘检测算法,可以将我们的图像格式作为输入,并输出标准格式(如PNG)。步骤2:Canny Edge检测•我们决定使用最适合Purdue这两个课程的方法,然后再将其推广。OPENCV包装中最有希望的边缘检测方法是Chany,Sobel,PreWitt和Laplacian。精明的边缘检测是最好的。•使用CANNY时,即使参数进行了调整,也存在很多多余的噪音,因此我们进行了额外的处理。•我们使用HSV掩码拍摄图像,仅保留适合给定颜色范围的图像的一部分。•颜色范围设置为球道和绿色的颜色,以隔离高尔夫球场。•为了减少HSV面膜产生的盐和胡椒噪声,我们使用了“非本地含量降解”技术,应用了降噪过滤器。•然后,我们采用了HSV过滤器的输出,并通过Canny Edge检测来运行它。输出是仅保留课程球道布局边缘的图像。o我们收集了整个美国高尔夫球场的图像。步骤3:概括我们的过程•下一步是概括与所有高尔夫球场一起使用的方法。o从那里,我们使用mageense.ai 2注释图像以获得“地面真相”。maveense.ai是一种Web工具,它允许我们用多边形注释数据,这将与Canny Edge检测多边形进行比较。•接下来,我们修改了该过程,以便能够通过卫星图像的文件夹迭代。然后,我们使用OPENCV的轮廓方法来纠正我们使用带注释的图像遇到的格式问题。•下一步是编写一个Python程序,将该过程的结果与地面真相进行比较。我们的目标是改变过程,看看变化有多改善或恶化结果。步骤4:与地面真相进行比较•我们为Canny做了多种方法,但是由于时间限制,我们选择了仅使用一种方法的联合3(IOU)比较的交集。•IOU是一种测量工具,可以确定对象检测器在特定对象集上的准确性。•我们选择了基于哪种方法在视觉上看起来最好的比较方法。
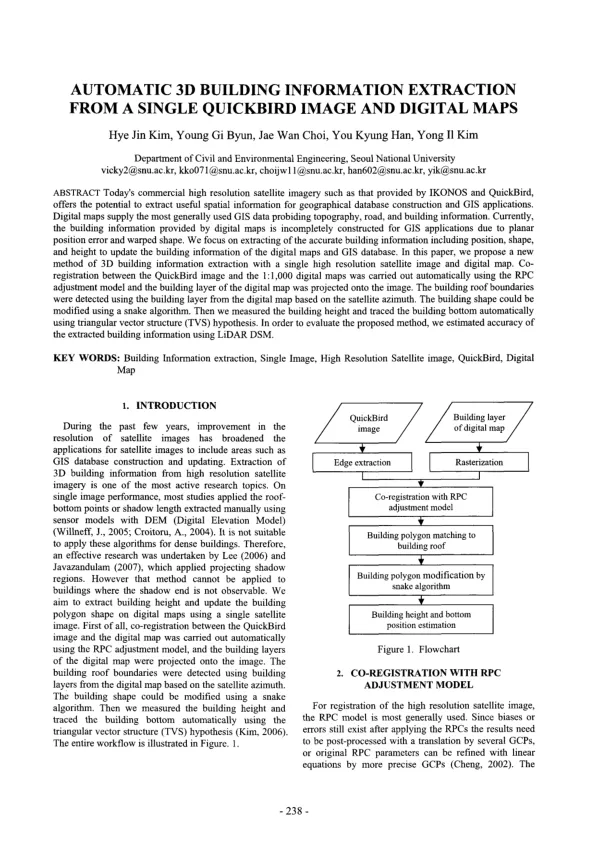
来自单张 QUICKBIRD 图像和数字地图
koreascience.or.kr › article › CFKO2... 作者:HJ Kim · 2007 — 作者:HJ Kim · 2007 边缘提取 光栅化 ... 检测器 (Canny, 1986)。我们让 a = 1, /9 = 1, ... 提取 3D 建筑结构,韩国遥感杂志。

设计和开发用于室内的自主无人机飞艇...
摘要 — 本项目旨在开发一种小型飞艇,由人类远程控制。飞艇是无人驾驶飞艇 (UAV) 之一,可用于广告、VIP 安全检查、交通监控和管理等。本项目的主要目的是设计和开发一种用于室内监控和监测应用的自主无人机飞艇。图像将从安装在吊舱底部的无线摄像头捕获。确定物体的质心点需要使用三相边缘检测器、精明算子和阈值。该对象将以 2D 坐标显示在图形用户界面 (GUI) 上。在这个项目中,系统一次只能检测一个物体。关键词 — 精明算子、图形用户界面 (GUI)、物体检测、边缘检测器
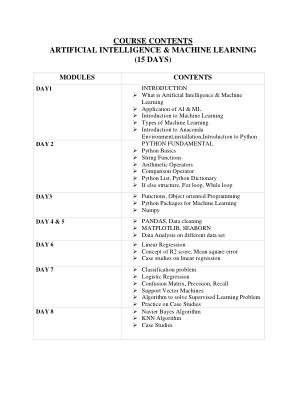
课程内容 人工智能与机器学习
问题 案例研究 计算机视觉简介 图像处理 理解颜色图 第 10 天 特征提取 高斯模糊 Canny 边缘检测 图像分割 线检测-Hough 变换 Harcaascade 分类器 第 11 天 人工神经网络简介 单层感知器 多层感知器 Keras 简介 前馈过程、反向传播、误差

使用CNN和SVM
摘要 - 如今,通过基于计算机的技术识别故障/裂纹是一种增长的趋势。任何高度响应的系统都可以以两个关键特征为特征:快速检测和高度准确,通过利用现代技术和有效利用资源。骨断裂是超出骨骼阈值的过量外力的结果。Canny Edge检测是一种图像处理方法,用于通过有效使用自动裂缝检测来检测骨断裂,并且压倒了降噪问题。如今,有几种可用于边缘检测的方法,例如:Canny,Log,PreWitt和Robert。但是,由于无法执行多分辨率分析,这些技术对于在分析过程中检测次要细节没有用。这些技术的另一个关键问题是,即使它们在高分辨率和高质量的图像方面正常工作,它们无法与嘈杂的图像一起使用,因为它们固有地缺乏区分边缘和噪声组件之间的能力。我们使用CNN算法对这些问题进行了胜过的方法。我们观察到的模拟结果是,提出的方法是在骨料尺度上执行边缘检测的更好选择。所提出的方法也已证明足以提取必要的信息,并进行所需的处理并比当前可用的边缘探测器更好地处理噪声。

SCREW IT:一种识别螺钉和紧固件的计算机视觉方法
1.4 项目约束 ................................................................................................ 9 1.4.1 螺钉尺寸 .............................................................................................. 9 1.4.2 螺钉长度 .............................................................................................. 10 2. 方法论 ........................................................................................................ 11 2.1 创建工作站 ............................................................................................. 11 2.1.1 3D 模型 ............................................................................................. 11 2.1.2 不幸 ............................................................................................. 14 2.2 软件开发 ............................................................................................. 16 2.2.1 数据处理器 ...................................................................................... 16 2.2.1.1 Canny 边缘检测 ............................................................................. 17 2.2.1.2 Hough 线变换 ............................................................................. 18 2.2.2 库 ............................................................................................................. 19 2.2.2.1 OpenCV ............................................................................................. 19 2.2.2.2 Tkinter ................................................................................ 19 2.2.2.3 Matplotlib ................................................................................ 19 2.3 结果 ........................................................................................................ 20 2.3.1. 初步结果 ........................................................................................ 20 2.3.1.1 初始测试图像 ........................................................................ 20 2.3.1.2 问题 ........................................................................................ 21 2.3.2 最终结果 ........................................................................................ 22 2.3.2.1 新的测试图像 ........................................................................ 22 2.3.2.2 问题 ........................................................................................ 25 2.3.2.3 置信度和讨论 ........................................................................ 26

人工智能基本原理
图片来源:图 16.2 转载自 Y. Aloimonos 和 A. Rosenfeld 所著的《计算机视觉》,Science 253 (5025),1991 年 9 月 13 日,经出版商和作者许可。• 图 16.3a 和 16.6 转载自 John Canny 所著的《边缘检测的计算方法》,IEEE PAMI,版权所有 1986 IEEE,经出版商和作者许可。• 图 16.5 和 16.21 由 Donald F. Geddis 生成。• 图 16.19 转载自 Jim Razzi 所著的《Fun with Unicorns》,经 Scholastic Inc. 许可。• 图 16.20 由 Rebecca Evans and Associates 数字化。 • 图 18.1 和 18.2 经作者许可,摘自 William van Melle 所著的《MYCIN 系统的结构》,载于 Bruce G. Buchanan 和 Edward H. Shortliffe 编辑的《基于规则的专家系统:斯坦福启发式编程项目的 MYCIN 实验》。