XiaoMi-AI文件搜索系统
World File Search SystemCentres
数据中心:印度房地产和监管层面
近年来,印度中央政府和各邦政府一直在积极制定政策和激励措施,以鼓励数据中心投资。尽管中央政策尚未最终确定,但许多邦已经采取措施吸引此类投资。这些措施包括财政激励措施,如对电力和输电费用的补贴和减免,以及实际支持,包括可再生能源、可靠的供水、高速互联网和优惠的建筑法规。一些邦还提供额外优惠,包括印花税减免、土地成本补贴、州商品及服务税报销和利息补贴,所有这些旨在为数据中心项目创造有利的环境。

家庭中心和儿童中心 - 春季时间表
更便捷的访问:通过一个地方或通过协调转介提供服务。整体支持:家庭获得更全面的支持,满足一系列需求。更好的结果:当服务得到整合和协调时,儿童和家庭往往会获得更好的结果。
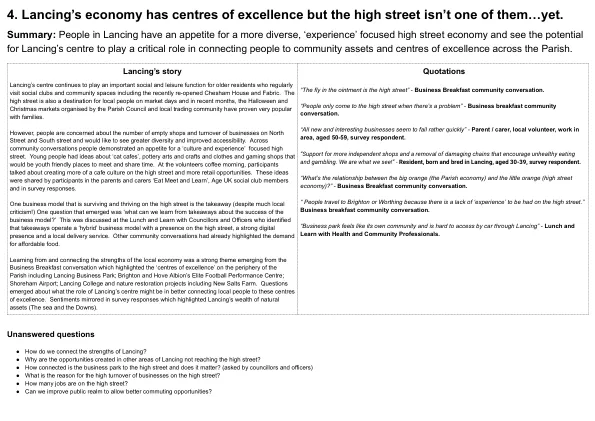
4. 兰辛的经济拥有卓越中心,但是......
然而,人们担心北街和南街的空置店铺数量和企业营业额,并希望看到更多的多样性和更好的可达性。在社区对话中,人们表现出对以“文化和体验”为重点的大街的渴望。年轻人有关于“猫咪咖啡馆”、陶艺和工艺品以及服装和游戏商店的想法,这些商店将成为年轻人聚会和共享时光的友好场所。在志愿者咖啡早会上,参与者谈到了在大街上创造更多的咖啡馆文化和更多的零售机会。这些想法由父母和护理人员“吃吃喝喝和学习”的参与者、英国老年社交俱乐部成员和调查回复分享。


自主船舶时代的岸上控制中心设计
摘要。随着高度自动化的船舶无人驾驶,其操作员将进入岸基控制中心。近年来,挪威科技大学建立了先进而灵活的研究基础设施,用于对自主船舶进行研究以及对这些船舶的监控和控制。基础设施包括 (1) milliAmpere1 和 milliAmpere2,这是两艘全电动自主城市客运渡轮,配备了先进的传感器和自主导航设备;(2) 岸上控制实验室,一个灵活的岸上控制中心,操作员可以在这里监控和控制一支自主船队;(3) 一个实验室部分,研究人员可以在这个实验室部分向控制中心的操作员发出指令,并记录、观察和分析他们的行为;(4) 一个毗邻控制室的观察室,利益相关者可以观察控制室正在进行的实验;(5) 渡轮模拟器 Autoferry Gemini,允许研究人员创建具有挑战性或高风险的场景,在这些场景中,操作员可以接受压力测试,而不会对船舶、船员和乘客造成危险;(6) 混合现实实验室 MRLAB,我们可以在虚拟环境中测试城市自主客运渡轮的物理设计;(7) 一个用于处理乘客并具有感应充电功能的码头。在本文中,我们首先描述了研究基础设施的目的和运行范围,以及技术设计、物理设置和设备。其次,我们提出了研究基础设施发展的路线图,以应对未来自主船舶及其监督和控制的研究挑战。第三,我们提出了未来几年将在实验室中探索的一些研究问题。
EPSRC 博士培训中心 (CDT) 大纲摘要
显然,需要进行重大变革,这需要新一代研究人员接受培训,采用跨学科和系统的方法应对自然和气候紧急情况。这些研究人员将具备捕捉和整合人工环境和自然环境的能力,以便做出公平、透明、全面和高效的决策。TWIN CDT 将通过培养敏捷的科学家来迈出这一步,这些科学家以团队形式发展,并在行业和政府利益相关者的指导下,开发必要的数字孪生架构及其支持的传感、智能处理和驱动能力。这将以数字孪生架构的现有优势(包括 UKRI 投资)为基础,将英国的全球领导地位扩展到新兴的自然数字孪生领域。
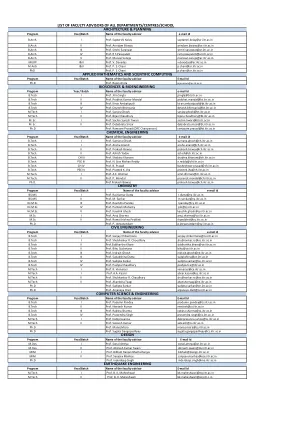
所有部门/中心/学校的教师顾问名单
计划年份/教师顾问电子邮件ID的批处理ID B.Tech I教授sanjay chikermane sanjay.chikermane@ce.iitr.ac.in B.Tech I教授Shubhankar R. Choudhary shubhankar.rc@ce.iitr.ac.in B.Tech II教授Siddhartha Khare Siddhartha.khare.khare@ce.ac.ac.in B.Tech II教授Bihu Suchetana bihu@ce.iitr.ac.in B.Tech III教授Indrajit Ghosh Indrajit.ghosh@ce.iitr.ac.in B.Tech III教授sudakshina dutta sudakshina@ce.iitr.ac.in B.Tech IV教授sudipta sarkar sudipta.sarkar@ce.iitr.ac.in B.Tech IV教授Pushpa Chaudhary Pushpa.fce@iitr.ac.in M.Tech I教授R. Vinnarasi vinnarasi@ce.iitr.ac.in M.Tech I教授A.A. kazmi absar.kazmi@ce.iitr.ac.in M.Tech II教授Shubhankar R. Chaudhary Shubhankar.rc@ce@ce.iitr.ac.in M.Tech II教授akanksha tyagi akansha.tyagi@ce.iitr.ac.in博士教授sudipta sarkar sudipta.sarkar@ce.iitr.ac.in博士学位。 anjaneya dixit anjaneya.dixit@ce.iitr.ac.in
自主船舶时代的岸上控制中心设计
摘要。随着高度自动化的船舶无人驾驶,其操作员将进入岸基控制中心。近年来,挪威科技大学建立了先进而灵活的研究基础设施,用于对自主船舶进行研究以及对这些船舶的监控和控制。基础设施包括 (1) milliAmpere1 和 milliAmpere2,这是两艘全电动自主城市客运渡轮,配备了先进的传感器和自主导航设备;(2) 岸上控制实验室,一个灵活的岸上控制中心,操作员可以在这里监视和控制一支自主船队;(3) 一个实验室部分,研究人员可以在这个实验室向控制中心的操作员发出指令,并记录、观察和分析他们的行为;(4) 一个毗邻控制室的观察室,利益相关者可以观察控制室正在进行的实验;(5) 渡轮模拟器 Autoferry Gemini,允许研究人员创建具有挑战性或高风险的场景,在这些场景中,操作员可以接受压力测试,而不会对船舶、船员和乘客造成危险;(6) 混合现实实验室 MRLAB,我们可以在虚拟环境中测试城市自主客运渡轮的物理设计;(7) 一个用于处理乘客并具有感应充电功能的码头。在本文中,我们首先描述了研究基础设施的目的和运行范围,以及技术设计、物理设置和设备。其次,我们提出了研究基础设施发展的路线图,以应对未来自主船舶及其监督和控制方面的研究挑战。第三,我们提出了未来几年将在实验室中探索的一系列研究问题。
自主船舶时代的岸上控制中心设计
摘要。随着高度自动化的船舶无人驾驶,其操作员将进入岸基控制中心。近年来,挪威科技大学建立了先进而灵活的研究基础设施,用于对自主船舶进行研究以及对这些船舶的监控和控制。基础设施包括 (1) milliAmpere1 和 milliAmpere2,这是两艘全电动自主城市客运渡轮,配备了先进的传感器和自主导航设备;(2) 岸上控制实验室,一个灵活的岸上控制中心,操作员可以在这里监视和控制一支自主船队;(3) 一个实验室部分,研究人员可以在这个实验室向控制中心的操作员发出指令,并记录、观察和分析他们的行为;(4) 一个毗邻控制室的观察室,利益相关者可以观察控制室正在进行的实验;(5) 渡轮模拟器 Autoferry Gemini,允许研究人员创建具有挑战性或高风险的场景,在这些场景中,操作员可以接受压力测试,而不会对船舶、船员和乘客造成危险;(6) 混合现实实验室 MRLAB,我们可以在虚拟环境中测试城市自主客运渡轮的物理设计;(7) 一个用于处理乘客并具有感应充电功能的码头。在本文中,我们首先描述了研究基础设施的目的和运行范围,以及技术设计、物理设置和设备。其次,我们提出了研究基础设施发展的路线图,以应对未来自主船舶及其监督和控制方面的研究挑战。第三,我们提出了未来几年将在实验室中探索的一系列研究问题。
自主船舶时代的岸上控制中心设计
摘要。随着高度自动化的船舶无人驾驶,其操作员将进入岸基控制中心。近年来,挪威科技大学建立了先进而灵活的研究基础设施,用于对自主船舶进行研究以及对这些船舶的监控和控制。基础设施包括 (1) milliAmpere1 和 milliAmpere2,这是两艘全电动自主城市客运渡轮,配备了先进的传感器和自主导航设备;(2) 岸上控制实验室,一个灵活的岸上控制中心,操作员可以在这里监视和控制一支自主船队;(3) 一个实验室部分,研究人员可以在这个实验室向控制中心的操作员发出指令,并记录、观察和分析他们的行为;(4) 一个毗邻控制室的观察室,利益相关者可以观察控制室正在进行的实验;(5) 渡轮模拟器 Autoferry Gemini,允许研究人员创建具有挑战性或高风险的场景,在这些场景中,操作员可以接受压力测试,而不会对船舶、船员和乘客造成危险;(6) 混合现实实验室 MRLAB,我们可以在虚拟环境中测试城市自主客运渡轮的物理设计;(7) 一个用于处理乘客并具有感应充电功能的码头。在本文中,我们首先描述了研究基础设施的目的和运行范围,以及技术设计、物理设置和设备。其次,我们提出了研究基础设施发展的路线图,以应对未来自主船舶及其监督和控制方面的研究挑战。第三,我们提出了未来几年将在实验室中探索的一系列研究问题。