XiaoMi-AI文件搜索系统
World File Search SystemCyborg

通过交互式智能重新定义机器人概括
大规模机器学习的最新进展已产生了能够适应一系列下游任务的高容量的“基础模型”。这种模型对机器人技术抱有很大的希望,但普遍的范式仍然将机器人描绘成单个自主决策者,并执行诸如操纵和导航之类的任务,并且人类参与度有限。然而,包括可穿戴机器人技术(例如,假肢,矫形器,外骨骼),近视和神经界面在内的大量实际机器人系统是半自治的,需要与人类合作伙伴进行持续的互动协调。在该立场论文中,我们认为机器人基础模型必须演变为交互式的多机构观点,以处理实时人类机器人共同适应的复杂性。We propose a generaliz- able, neuroscience-inspired architecture encompassing four modules: (1) a multimodal sensing module informed by sensorimotor integration principles, (2) an ad-hoc teamwork model reminiscent of joint-action frameworks in cognitive science, (3) a predictive world belief model grounded in internal model theories of motor control, and (4) a memory/feedback mechanism that呼应了基于Hebbian和基于增强的可塑性的概念。尽管通过机器人系统的镜头进行了说明,但可穿戴设备和人类生理学的镜头与众不同,但所提出的框架广泛适用于在半自治或交互式环境中运行的机器人。通过超越单一代理设计,我们的立场强调了机器人技术中的基础模型如何实现更强大,个性化和预期的性能水平。
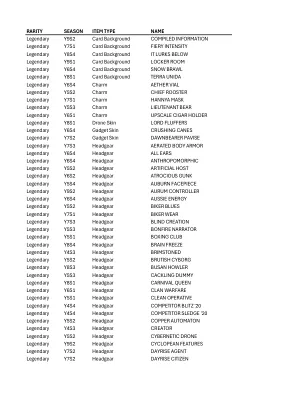
稀有
稀有季节项目类型名称名称传奇Y9S2卡背景汇编的信息传奇Y7S1卡背景烈性强度传奇Y8S4卡背景它潜伏在传奇Y9S1 Y9S1卡背景储物室传奇Y6S4卡背景雪斗士背景雪斗士斗争传奇Y8S1卡背景Y8S Card Terra Unida unida y6s4 y6s4 y6s4 y6s4 y6s4 y 77魅力Hannana面具传奇Y5S3魅力中尉熊传奇Y6S1魅力高档雪茄持有人传奇Y8S1无人驾驶Y8S1无人驾驶lod fluffers fruffers ligendary y6s4小工具粉碎皮肤粉碎的拐杖传奇an gadget y7s2 gadge Y6S4 Headgear ANTHROPOMORPHIC Legendary Y5S2 Headgear ARTIFICIAL HOST Legendary Y6S2 Headgear ATROCIOUS GUNK Legendary Y5S4 Headgear AUBURN FACEPIECE Legendary Y9S2 Headgear AURUM CONTROLLER Legendary Y6S4 Headgear AUSSIE ENERGY Legendary Y5S2 Headgear BIKER BLUES Legendary Y7S1 Headgear BIKER WEAR Legendary Y7S3 Headgear BLIND CREATION Legendary Y5S3 Headgear BONFIRE NARRATOR Legendary Y5S1 Headgear BOXING CLUB Legendary Y8S4 Headgear BRAIN FREEZE Legendary Y4S3 Headgear BRIMSTONED Legendary Y5S2 Headgear BRUTISH CYBORG Legendary Y8S3 Headgear BUSAN HOWLER Legendary Y5S3 Headgear CACKLING DUMMY Legendary Y8S1头戴式狂欢节女王传奇Y6S1头饰氏族战争传奇Y5S1头戴头饰清洁手术传奇Y4S4头戴式Y4S4头戴式竞争者Blitz '20传奇Y4S4头戴式Y4S4头戴式游戏竞争者SLEDGE '20传奇Y5S2头Y5S 2头coper peper y4s y4s y4s y4s y4s y4s thecernaty y tegear y 55 Y9S2头饰cyclopean具有传奇的Y7S2头饰代理商传奇Y7S2头饰dayrise citizen

情感人工智能进步的社会和伦理影响
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.

国际研讨会伊斯兰法...
摘要 人工智能被呈现为持续变化的最好例子,这使得讨论的领域不断扩大。它所提出的方向永远不符合所提出的定义。此外,还需要制定在实证法和宗教法中与人工智能直接相关的国家法和国际法。为了正确解决人工智能问题,需要了解一些初步信息。其中最重要的是:大脑、身心问题、心智讨论、脑机比较(大脑建模)、数学现实、经典-符号-模糊逻辑(人工智能、人工智能对决策的影响)、算法、数据、大数据、云技术、机器学习、深度学习、自主性、优化(元启发式)、遗传算法、机器人(半机械人)、安全(数据和国家-国际)、人工智能系统和人工智能讨论、个人数据安全、责任、计算。还应当注意的是,以下内容在人工智能背景下也很重要:控制论、数字化、控制论系统、虚拟现实(如模拟、虚拟/电子环境中的全息图、网络危机和生活虚拟性)可以作为主要内容列出、添加或删除。然而,尽管人工智能系统越来越多地被用于做出影响个人和社会的决策,但这些系统基于数据集学习的事实并不能保证它们的输出不受人类偏见和歧视的影响,这是一个重大问题。声称人工智能司法将比人类的判决更为公正,尤其是在法律方面,似乎忽视了人工智能系统的这些方面。因为人工智能的每一次新用途,造成不平等、歧视和侵犯个人数据保护权的风险都会增加。
拍打期间蜜蜂大脑活动的行为控制和大脑活动的变化
Bao,L.,Zheng,N.,Zhao,H.,Hao,Y.,Zheng,H. (2011)。 使用神经电刺激对拴系蜜蜂的飞行控制。 国际IEEE/EMBS神经工程会议,墨西哥坎昆。 http://doi.org/10.1109/ner.2011.5910609 Bermudez,F。G.和Fearing,R。(2009)。 拍打机器人上的光流。 IEEE/RSJ国际智能机器人和系统会议。 http://doi.org/10.1109/iros.2009.5354337 Bozkurt,A.,Paul,A.,Pulla,S.,Ramkumar,A. (2007)。 在早期变形过程中插入的微型探针微型系统平台,以启动昆虫飞行肌肉。 IEEE第20届国际微电动机械系统会议(MEMS),日本诺戈。 https://doi.org/10.1109/memsys.2007.4432976 Bozkurt,A.,Gilmour,R。,R。,&Lal,A。 (2009a)。 射射线助理的射击辅助飞行。 IEETRANSACTIONSONBIO-MEDICALENGINER,56,2304–2307。 https://doi.org/10.1109/tbme.2009.2022551 Bozkurt,A.,Gilmour,R.,Sinha,A.,Stern,D。,&Lal,A. (2009b)。 基于昆虫素界面的神经结核病学。 IEEE交易,关于生物医学工程的交易,56,1727–1733。 https://doi.org/10.1109/tbme.2009.2015460 Bozkurt,A.,Gilmour,R.,Stern,D。,D。,&Lal,A. (2008a)。 基于MEMS的生物电子神经肌肉界面,用于昆虫半机械人的飞行控制。 美国亚利桑那州图森市第21届IEEE国际微型机械系统会议。 从昆虫到机器。Bao,L.,Zheng,N.,Zhao,H.,Hao,Y.,Zheng,H.(2011)。使用神经电刺激对拴系蜜蜂的飞行控制。国际IEEE/EMBS神经工程会议,墨西哥坎昆。http://doi.org/10.1109/ner.2011.5910609 Bermudez,F。G.和Fearing,R。(2009)。拍打机器人上的光流。IEEE/RSJ国际智能机器人和系统会议。http://doi.org/10.1109/iros.2009.5354337 Bozkurt,A.,Paul,A.,Pulla,S.,Ramkumar,A.(2007)。在早期变形过程中插入的微型探针微型系统平台,以启动昆虫飞行肌肉。IEEE第20届国际微电动机械系统会议(MEMS),日本诺戈。https://doi.org/10.1109/memsys.2007.4432976 Bozkurt,A.,Gilmour,R。,R。,&Lal,A。(2009a)。射射线助理的射击辅助飞行。IEETRANSACTIONSONBIO-MEDICALENGINER,56,2304–2307。 https://doi.org/10.1109/tbme.2009.2022551 Bozkurt,A.,Gilmour,R.,Sinha,A.,Stern,D。,&Lal,A. (2009b)。 基于昆虫素界面的神经结核病学。 IEEE交易,关于生物医学工程的交易,56,1727–1733。 https://doi.org/10.1109/tbme.2009.2015460 Bozkurt,A.,Gilmour,R.,Stern,D。,D。,&Lal,A. (2008a)。 基于MEMS的生物电子神经肌肉界面,用于昆虫半机械人的飞行控制。 美国亚利桑那州图森市第21届IEEE国际微型机械系统会议。 从昆虫到机器。IEETRANSACTIONSONBIO-MEDICALENGINER,56,2304–2307。https://doi.org/10.1109/tbme.2009.2022551 Bozkurt,A.,Gilmour,R.,Sinha,A.,Stern,D。,&Lal,A.(2009b)。基于昆虫素界面的神经结核病学。IEEE交易,关于生物医学工程的交易,56,1727–1733。https://doi.org/10.1109/tbme.2009.2015460 Bozkurt,A.,Gilmour,R.,Stern,D。,D。,&Lal,A.(2008a)。基于MEMS的生物电子神经肌肉界面,用于昆虫半机械人的飞行控制。美国亚利桑那州图森市第21届IEEE国际微型机械系统会议。从昆虫到机器。http://doi.org/10.1109/memsys.2008。 4443617 Bozkurt,A.,Lal,A。,&Gilmour,R。(2008b)。 对昆虫肌肉的电加热进行飞行控制。 加拿大温哥华的机器和生物学协会IEEE工程学的第30届年度国际会议。 https://doi.org/10.1109/iembs.2008.4650529 Breugel,F。V.,Regan,W。,&Lipson,H。(2008)。 IEEE机器人和自动化,15,68-74。 https://doi.org/10.1109/mra.2008。 929923 CAO,F.,Zhang,C.,Choo,H。Y.,&Sato,H。(2016)。 具有用户调整速度,步长和步行长度的昆虫计算机混合腿机器人。 皇家学会界面杂志,20160060 13,http://doi.org/10。 1098/rsif.2016.0060 Chung,A。J.,&Erickson,D。(2009)。 使用未成熟的植入微流体的工程昆虫飞行代谢。 芯片上的实验室,9,669–676。 https://doi.org/10.1039/b814911a Daly,D.C.,Mercier,P.P.,Bhardwaj,M.,Stone,A.L.,A.L.,Aldworth,Z。N. 脉冲UWB接收器SOC进行昆虫运动控制。 IEEE固态电路杂志,45,153–166。 https://doi.org/10.1109/jssc.2009.2034433 Fraser Rowell,C。H.(1963)。 一种长期植入刺激电极进入蝗虫大脑的方法,以及刺激的一些结果。http://doi.org/10.1109/memsys.2008。4443617 Bozkurt,A.,Lal,A。,&Gilmour,R。(2008b)。对昆虫肌肉的电加热进行飞行控制。加拿大温哥华的机器和生物学协会IEEE工程学的第30届年度国际会议。 https://doi.org/10.1109/iembs.2008.4650529 Breugel,F。V.,Regan,W。,&Lipson,H。(2008)。 IEEE机器人和自动化,15,68-74。 https://doi.org/10.1109/mra.2008。 929923 CAO,F.,Zhang,C.,Choo,H。Y.,&Sato,H。(2016)。 具有用户调整速度,步长和步行长度的昆虫计算机混合腿机器人。 皇家学会界面杂志,20160060 13,http://doi.org/10。 1098/rsif.2016.0060 Chung,A。J.,&Erickson,D。(2009)。 使用未成熟的植入微流体的工程昆虫飞行代谢。 芯片上的实验室,9,669–676。 https://doi.org/10.1039/b814911a Daly,D.C.,Mercier,P.P.,Bhardwaj,M.,Stone,A.L.,A.L.,Aldworth,Z。N. 脉冲UWB接收器SOC进行昆虫运动控制。 IEEE固态电路杂志,45,153–166。 https://doi.org/10.1109/jssc.2009.2034433 Fraser Rowell,C。H.(1963)。 一种长期植入刺激电极进入蝗虫大脑的方法,以及刺激的一些结果。加拿大温哥华的机器和生物学协会IEEE工程学的第30届年度国际会议。https://doi.org/10.1109/iembs.2008.4650529 Breugel,F。V.,Regan,W。,&Lipson,H。(2008)。 IEEE机器人和自动化,15,68-74。 https://doi.org/10.1109/mra.2008。 929923 CAO,F.,Zhang,C.,Choo,H。Y.,&Sato,H。(2016)。 具有用户调整速度,步长和步行长度的昆虫计算机混合腿机器人。 皇家学会界面杂志,20160060 13,http://doi.org/10。 1098/rsif.2016.0060 Chung,A。J.,&Erickson,D。(2009)。 使用未成熟的植入微流体的工程昆虫飞行代谢。 芯片上的实验室,9,669–676。 https://doi.org/10.1039/b814911a Daly,D.C.,Mercier,P.P.,Bhardwaj,M.,Stone,A.L.,A.L.,Aldworth,Z。N. 脉冲UWB接收器SOC进行昆虫运动控制。 IEEE固态电路杂志,45,153–166。 https://doi.org/10.1109/jssc.2009.2034433 Fraser Rowell,C。H.(1963)。 一种长期植入刺激电极进入蝗虫大脑的方法,以及刺激的一些结果。https://doi.org/10.1109/iembs.2008.4650529 Breugel,F。V.,Regan,W。,&Lipson,H。(2008)。IEEE机器人和自动化,15,68-74。https://doi.org/10.1109/mra.2008。929923 CAO,F.,Zhang,C.,Choo,H。Y.,&Sato,H。(2016)。具有用户调整速度,步长和步行长度的昆虫计算机混合腿机器人。皇家学会界面杂志,20160060 13,http://doi.org/10。1098/rsif.2016.0060 Chung,A。J.,&Erickson,D。(2009)。使用未成熟的植入微流体的工程昆虫飞行代谢。芯片上的实验室,9,669–676。https://doi.org/10.1039/b814911a Daly,D.C.,Mercier,P.P.,Bhardwaj,M.,Stone,A.L.,A.L.,Aldworth,Z。N.脉冲UWB接收器SOC进行昆虫运动控制。IEEE固态电路杂志,45,153–166。https://doi.org/10.1109/jssc.2009.2034433 Fraser Rowell,C。H.(1963)。一种长期植入刺激电极进入蝗虫大脑的方法,以及刺激的一些结果。