XiaoMi-AI文件搜索系统
World File Search SystemDONN
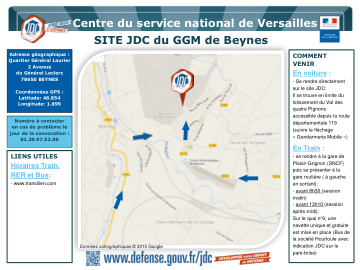
Beynes 总经理的 JDC 网站
- 前往 Plaisir-Grignon 站 (SNCF),然后前往巴士站(出站后在左侧): - 上午 8:30 之前(上午时段) - 下午 1:10 之前(下午时段):在 9 号站台,有一辆免费班车(Hourtoule 公司巴士,挡风玻璃上印有 JDC 标志) 地图数据 © 2015 Google

飞行员为飞行员撰写的评论 - SNPL
我们早已接受了这样一个事实:我们被两个系统持续记录。驾驶舱语音记录器(CVR)和飞行数据记录器(DFDR)。这些记录器有助于了解一定数量的事故。这种接受在当时只是通过建立有关其使用的严格规定才得到验证。事实上,这些录音只能在事故或严重事件发生后使用。当然,这些只是在技术调查框架内,从系统的角度来看,并且受到保密的约束。因此,在任何情况下都不能将其全部披露。调查报告中仅公布了 CVR 的删节部分,即了解事件所需的数据。
射频识别 (RFID) - OECD iLibrary
如上所述,RFID系统面临的风险差异很大,不仅取决于所使用的技术,还取决于环境和应用场景。根据 OECD 安全指南,风险评估和管理有助于解决 RFID 系统的安全问题。全面的风险方法(即考虑系统生命周期的每个阶段——规划、部署、操作、数据处理和生命周期结束——以及系统的每个组件——标签和阅读器、中间件)、数据库、网络和服务器组件)对于制定总体安全策略是必要的。风险评估和管理策略有助于确定是否需要整合系统的某些要素以弥补无法直接填补的空白。

2020 年 10 月 - STid
“武器室是一个战略工作空间。 “我们希望实现门禁控制和设备识别,”维尔瑞夫市警察局副局长拉希德·贝纳塔 (Rachid Benatta) 说道。 STid 的 BE.Weapon 解决方案于 2020 年 3 月部署在大约一百件武器上。每把武器都配备了无源 RFID 标签,这意味着只有当它经过军械库柜台上或柜台下方安装的读取器前面时,才会发送数据。因此,当特工到达那里时,他会扫描自己的徽章进行身份识别,并且看到的每件设备都与他相关联。该解决方案不仅列出了武器,还可以盘点弹药。退回设备时也执行相同的程序。数据直接记录到系统中并存储在社区的安全服务器上。

军事评论 2022 年 3 月至 4 月 - 陆军大学出版社
陆军大学教务长;CGSC 的 DCG:美国陆军少将 Donn H. Hill 主任兼主编:美国陆军上校 Jacob M. Brown 总编辑:William M. Darley,美国陆军上校(退役)编辑助理:Chris Gardner 作战官:美国陆军少校 Jordan Bellamy 高级编辑:Jeffrey Buczkowski,美国陆军中校(退役)撰稿和编辑:Beth Warrington;Allyson McNitt,博士 平面设计:Arin Burgess 网站管理员:Michael Serravo;James Crandell、Kyle Davis、Dominic Graham—承包商编辑委员会成员:Rich Creed,美国陆军上校(退役))—联合兵种条令理事会主任; Lester W. Grau 博士 — 外国军事研究办公室研究主任;Sam Saine 上校 — 陆军职业与领导力中心主任;Christopher J. Keller 上校 — 陆军经验教训中心主任;Howard Brewington — MCCoE 副主任;Edward T. Bohnemann,美国陆军上校(退役)) — 联合兵种中心训练副主任;Richard J. Dixon,美国陆军上校(退役)) — 高级军事研究学院副院长 顾问编辑:Ricardo Yoshiyuki Omaki 上校 — 巴西陆军,葡萄牙语版;Zachary Griffiths 少校,第 10 特种部队组(空降),特种作战;Thomas Fox 少校,国际事务 — 亚洲事务,USMA
军事评论 2022 年 3 月至 4 月 - 陆军大学出版社
陆军大学教务长;CGSC 的 DCG:美国陆军少将 Donn H. Hill 主任兼主编:美国陆军上校 Jacob M. Brown 总编辑:William M. Darley,美国陆军上校(退役)编辑助理:Chris Gardner 作战官:美国陆军少校 Jordan Bellamy 高级编辑:Jeffrey Buczkowski,美国陆军中校(退役)撰稿和编辑:Beth Warrington;Allyson McNitt,博士 平面设计:Arin Burgess 网站管理员:Michael Serravo;James Crandell、Kyle Davis、Dominic Graham—承包商编辑委员会成员:Rich Creed,美国陆军上校(退役))—联合兵种条令理事会主任; Lester W. Grau 博士 — 外国军事研究办公室研究主任;Sam Saine 上校 — 陆军职业与领导力中心主任;Christopher J. Keller 上校 — 陆军经验教训中心主任;Howard Brewington — MCCoE 副主任;Edward T. Bohnemann,美国陆军上校(退役)) — 联合兵种中心训练副主任;Richard J. Dixon,美国陆军上校(退役)) — 高级军事研究学院副院长 顾问编辑:Ricardo Yoshiyuki Omaki 上校 — 巴西陆军,葡萄牙语版;Zachary Griffiths 少校,第 10 特种部队组(空降),特种作战;Thomas Fox 少校,国际事务 — 亚洲事务,USMA

异步合并对基于
摘要:为了确保服务质量和智能车辆的可靠和强大的操作,必须加深感知,位置和障碍物的阶段至关重要。的确,这些方面至关重要,因为它们提供了决策和预测模块甚至轨迹计划所需的数据。提出的论文涉及从立体电视摄像机,Lidar等不同方式的道路障碍检测系统的设计,而这些摄像机的设计很少或没有同步。在拟议的论文中,应将深度学习方法应用于通过融合多模态数据来构建3D对象检测体系结构。大多数现有的方法基于以下假设:数据完全同步,但是信息的数量和信息来源的增加越多,这些来源的同步约束就越难以尊重和保证,从而产生了对智能车辆安全性产生强大影响的科学锁定。在不同级别的深神经元网络的建筑中(早期,中间和/或迟到)在不确定性和信念的功能中融合,应确保在复杂且不利的条件下(缺乏照明,图像的饱和度),并弹性地在Cameras和Sensors的崩溃中建立强大的系统。