XiaoMi-AI文件搜索系统
World File Search SystemDUI

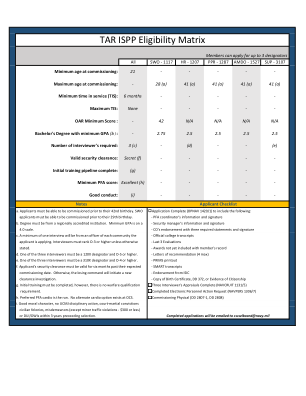
BHCDP 资格 - DUI 和 IPV 犯罪详情
2024 年 10 月 30 日,研究与统计部门收到一份报告请求,该报告详细说明了当前具体的酒后驾驶 (DUI) 和亲密伴侣暴力 (IPV) 指控以及与审前服务部门进行的行为健康有条件解雇计划 (BHCDP) 资格评估相关的先前定罪。审前服务部门使用的信息系统 PRIM 的数据被用于查询 2023 和 2024 日历年 (CY) 期间创建的包括 BHCDP 评估的审前访谈。从 CourtNet 数据库查询了与这些访谈相关的 BHCDP 试点县提起的案件指控信息,该数据库包含全州案件的摘要。在针对同一被告的每次审前访谈之前,从 CourtNet 中的案件中确定了不符合 BHCDP 资格的指控定罪,其犯罪历史密钥与查询访谈中的被告相匹配。
DUI 综合治疗团队 (DITT) 计划
DITT 计划联系信息 计划地点: 电话号码: 1777 6 th Street, Boulder (720) 564-2480 1035 Kimbark, Longmont (720) 564-2480 治疗机构: 博尔德县社区司法服务 - 恢复我们的社区 (ROC) PO Box 471, Boulder CO 80306 位于 6 th & Canyon 的博尔德县司法中心 联系人: Michele-Renee Monge 电话:(303) 441-4789 行为治疗服务/变革中心 5600 Arapahoe Avenue, Boulder CO 80301 联系人: Alyssa Hetschel 电话:303-772-3382 DITT 缓刑官: Awilda Alaniz-Cruz (303) 441-3715 Morgan Boltz (720)564-2550 Levi Pederson (303) 441-3713 Allison Dunn (720) 564-2516 DITT 协调员/团队负责人:Jessica Lucas (303)-941-8348 治疗法庭协调员:Christina Orlowski (303) 441-4728 物质使用监测:Boulder Longmont Intervention UABACO 5600 Arapahoe, Suite 100, Boulder, CO 80303 700 Ken Pratt Blvd, Suite 121, Longmont 办公室电话:(303) 544-1840 办公室电话:(970) 292-8882 分机。 4 干预客户热线:303-785-6174 UABACO 客户热线:303-785-6174 干预/博尔德营业时间: 周一至周五:上午 7:00 - 下午 12:00;下午 1:00 - 下午 5:00(必须在下午 4:30 前签到) 周六:下午 12:00 - 下午 6:00(必须在下午 5:30 前签到) 周日:休息* *请与您的缓刑官讨论周日的测试选项。 UABACO/朗蒙特营业时间: 周一至周六:上午 11:00 - 上午 12:00 周日:周日营业时间仅在洛夫兰和柯林斯堡地点提供
弗雷斯诺县DUI合作法院政策和...
计划概述弗雷斯诺县DUI法院是一项针对合格参与者的法院监督,全面的待遇,合作计划。针对弗雷斯诺县进行的研究表明,在醉酒期间驾驶的个人越来越关注。已经提出了该治疗法院的实施,以降低罪犯之间的累犯率并提高我们社区的公共安全。与其他国家模型DUI法院计划类似,该职位裁决计划是为成人设计的,并在团队概念上进行操作,涉及增加监督,强制性药物滥用治疗,个人/团体咨询以及频繁的测试以监控合规性。通过基于证据的最佳治疗和监督实践,参与者将学习如何为自己和家人带来更健康,更安全的生活,同时保持清洁和清醒的生活。DUI Court是一项两条轨道治疗模型计划,主要针对高风险/高需求的被告,被指控犯有随后的轻罪DUI犯罪。被告将首先出现在其家庭法院部门,并向他们提供有关该治疗法院的信息。Prima Facie被告将接受DUI法院小组的筛查/评估,以确保他们有资格参加该计划。有兴趣参加的人将被接纳。一旦批准了参与者,将对DUI指控认罪,将判处监禁并留下来,他们将开始监督和治疗计划。成员:拒绝参加该计划的被告将被转回其主场继续诉讼。如果被告后来认罪/无竞赛或被判有罪,则可能会被转录,以进行重新筛选,如果仍然有资格参加该计划。社区咨询委员会委员会将双年间开会,讨论该计划的状态,就计划政策和协议提出建议,并解决该计划正在遇到的任何问题,这些问题可以解决目标。指导委员会将由每个机构的行政级别人员组成,以促进在执行层面上支持该组织的同时迅速解决问题的过程。

波士顿、伍斯特和北安普顿的拼车量和酒驾事件,
执行摘要 拼车为解决美国持续存在的酒驾危害提供了一个有希望的机会。这项研究调查了马萨诸塞州三个地方(波士顿、伍斯特和北安普敦)的 Lyft 和 Uber 拼车量与酒驾事件及逮捕之间的关系。在这三个地方,随着拼车(Lyft、Uber 或两者兼有)在这些社区的广泛引入,酒驾事件或逮捕数量大幅减少。引入后,事件和逮捕数量的下降幅度从北安普敦的 39.4% 到伍斯特的 52.9% 不等。虽然还需要未来的研究,但这些结果有力地表明了拼车在解决当地社区酒驾问题方面的潜力。简介 每天,美国约有 32 人死于酒驾车祸——也就是每 45 分钟就有一人丧生。根据美国国家公路交通安全管理局 (NHTSA) 的数据,2020 年,因酒驾造成的交通死亡人数为 11,654 人,比 2019 年(死亡人数从 10,196 人增加到 11,654 人)增加了 14%,而 2019 年至 2020 年期间总死亡人数增加了 6.8%(NSCA,2022 年)。过去 10 年,酒驾死亡人数从 2011 年的 9,865 人增加到 2020 年的 11,654 人。2020 年全国机动车事故中酒驾死亡率为每 1 亿车辆行驶英里 (VMT) 0.40 人,高于 2019 年的 0.31 人。过去 10 年酒驾死亡率增加了 21%,从 2011 年的 0.33 人增加到 2020 年的 0.40 人(NSCA,2022 年)。酒驾除了造成生命损失外,还带来了巨大的代价。每年因酒精导致的车祸损失总计超过 440 亿美元(Blincoe 等人,2010 年)。冠状病毒病 (COVID-19) 严重影响了交通安全,给交通安全专业人员带来了诸多挑战。研究表明,尽管车辆行驶里程 (VMT) 有所下降,但由于在此期间危险驾驶行为有所增加,撞车事故也有所增加;尤其是酒驾、不系安全带和超速驾驶 (Wagner 等人,2020 年)。研究还表明,COVID-19 大流行与与疾病引起的发病率和死亡率以及缓解活动相关的心理健康挑战有关。在一项为确定这种关联而进行的调查中,13.3% 的受访者报告说他们开始或增加了使用药物来应对与 COVID-19 相关的压力或情绪 (Czeisler 等人,2020 年)。美国每个州都颁布了酒驾和药驾法律。美国各地的酒驾法律禁止血液酒精含量 (BAC) 达到或超过 0.08 的驾驶行为。 2017 年犹他州立法机构通过了 HB155“酒后驾驶
筛查、治疗和教育设施报告
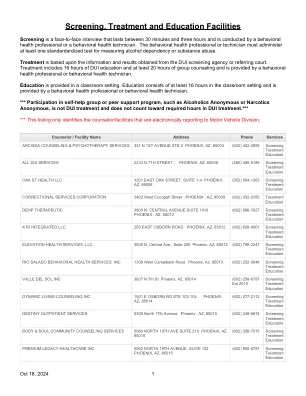
筛查、治疗和教育设施 筛查是一种面对面访谈,持续时间为 30 分钟到 3 小时,由行为健康专业人员或行为健康技术员进行。行为健康专业人员或技术员必须进行至少一项标准化测试,以衡量酒精依赖性或药物滥用。治疗基于从 DUI 筛查机构或转介法院获得的信息和结果。治疗包括 16 小时的 DUI 教育和至少 20 小时的团体咨询,由行为健康专业人员或行为健康技术员提供。教育在课堂环境中提供。教育至少包括 16 小时的课堂环境,由行为健康专业人员或行为健康技术员提供。 *** 参加自助小组或同伴支持计划(例如匿名戒酒会或匿名戒毒会)不是 DUI 治疗,不计入 DUI 治疗所需的小时数。*** *** 此列表仅标识以电子方式向机动车部门报告的顾问/设施。
弗雷斯诺县高等法院duicourt
计划概述弗雷斯诺县DUI法院是一项针对合格参与者的法院监督,全面的待遇,合作计划。针对弗雷斯诺县进行的研究表明,在醉酒期间驾驶的个人越来越关注。已经提出了该治疗法院的实施,以降低罪犯之间的累犯率并提高我们社区的公共安全。与其他国家模型DUI法院计划类似,该职位裁决计划是为成人设计的,并在团队概念上进行操作,涉及增加监督,强制性药物滥用治疗,个人/团体咨询以及频繁的测试以监控合规性。通过基于证据的最佳治疗和监督实践,参与者将学习如何为自己和家人带来更健康,更安全的生活,同时保持清洁和清醒的生活。目前构成的DUI法院是针对高风险/高需求的单轨治疗模型计划,被指控犯有随后的轻罪DUI犯罪。被告将首先出现在其家庭法院部门,并向他们提供有关该治疗法院的信息。Prima Facie被告将接受DUI法院小组的筛查/评估,以确保他们有资格参加该计划。有兴趣参加的人将被接纳。一旦批准了参与者,将对DUI指控认罪,将判处监禁并留下来,他们将开始监督和治疗计划。成员:拒绝参加该计划的被告将被转回其主场继续诉讼。如果被告后来认罪/无竞赛或被判有罪,则可以将他们转录,如果仍然有资格参加该计划。社区咨询委员会委员会将双年间开会,讨论该计划的状态,就计划政策和协议提出建议,并解决该计划正在遇到的任何问题,这些问题可以解决目标。指导委员会将由每个机构的行政级别人员组成,以促进在执行层面上支持该组织的同时迅速解决问题的过程。
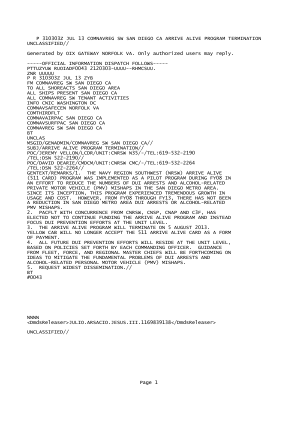
P 310303Z 7 月 13 日 COMNAVREG SW 圣地亚哥 CA 活着抵达程序员
-----官方信息调度如下----- PTTUZYUW RUOIADF0043 2120303-UUUU--RHMCSUU。 ZNR UUUUU PR 310303Z JUL 13 ZYB FM COMNAVREG SW 圣地亚哥 CA 至所有 SHOREACTS 圣地亚哥地区 所有船舶均在圣地亚哥 CA 所有 COMNAVREG SW 租户活动信息 CNIC 华盛顿特区 COMNAVSAFECEN 诺福克 VA COMTHIRDFLT COMNAVAIRPAC 圣地亚哥 CA COMNAVSURFPAC SAN DIEGO CA COMNAVREG SW SAN DIEGO CA BT UNCLAS MSGID/GENADMIN/COMNAVREG SW SAN DIEGO CA// SUBJ/ARRIVE ALIVE 计划终止// POC/JEREMY VELLON/LCDR/UNIT:CNRSW N35/-/TEL:619-532-2190 /TEL:DSN 522-2190 // POC/DAVID DEARIE/CMDCM/UNIT:CNRSW CMC/-/TEL:619-532-2264 /TEL:DSN 522-2264// GENTEXT/REMARKS/1. 海军西南地区 (NRSW) 安全抵达 (511 CARD) 计划于 2008 财年作为试点计划实施,旨在减少圣地亚哥都会区酒后驾车逮捕和与酒精有关的私家车 (PMV) 事故的数量。自实施以来,该计划的使用量和成本都大幅增长。然而,从 2008 财年到 2013 财年,圣地亚哥大都会区酒驾逮捕案和与酒精有关的 PMV 事故案并没有减少。2. PACFLT 在 CNRSW、CNSP、CNAP 和 C3F 的同意下,决定不再继续资助 ARRIVE ALIVE 计划,而是将重点放在单位层面的酒驾预防工作上。3. ARRIVE ALIVE 计划将于 2013 年 8 月 5 日终止。YELLOW CAB 将不再接受 511 ARRIVE ALIVE 卡作为付款方式。 4. 未来所有酒驾预防工作都将以单位级别开展,以各指挥官制定的政策为基础。舰队、部队和地区总司令将提供指导,以缓解酒驾逮捕和与酒精相关的个人机动车 (PMV) 事故的根本问题。5. 要求最广泛传播。// BT #0043

军事心理技能问卷名称:
集中注意力能力 17.在执行任务/简报时,我的想法经常在别处。18.只有沟通才能让我在执行任务/简报时放松下来。19.意外的噪音让我的表现不佳。20.容易分心对我来说是个问题。