XiaoMi-AI文件搜索系统
World File Search SystemDyn
65040D Dynabeads™ RNA 结合缓冲液
65040D Dynabeads™ RNA 结合缓冲液包装批次:2980952 有效期:2024 年 12 月 12 日 (DD.MM.YYYY) 储存:5±3°C 注意:仅供研究使用。不可用于诊断程序。
内源性Orexin和dynorphin Corelease对投影定义的腹侧换段多巴胺神经元的明显神经调节作用
神经元通过Orexin 1(OX1R)或Kappa阿片类药物(Kor)受体。鉴于OX1R激活增加了VTA DAFINF,而Kor会减少燃料,因此尚不清楚加冕的肽如何促进DA神经元的净活性。我们测试了对LH OX/DYN神经调节的光刺激是否通过肽释放来释放VTA DA神经元活性,以及基于VTA DA投影靶标(包括基底外侧杏仁核(BLA)(BLA)或内医生或内膜外壳的光学驱动的LH OX/DYN释放的效果。使用电路跟踪,光遗传学和斑块夹电生理学的组合,在男性和女性Orexin Cre小鼠中,我们显示出对VTA DA神经元的LH ox/dyn光学刺激的多样化响应,这不是由快速发射器释放介导的,并被拮抗剂封闭,并被拮抗剂驱动到Kor和Ox1r和Ox1r Signal1r。此外,在VTA中对LH OX/DYN输入的光学刺激抑制了大多数BLA验证的VTA DA神经元的结构,而VTA双向的LH ox/dyn输入的光学刺激会影响lacbsh-或machsh-progenting vta neurons的filtirection。这些发现表明,LH ox/dyn Corelease可能通过在每个人群中平衡神经元的合奏,从而影响VTA的输出,从而有助于寻求奖励的不同方面。

安全数据表
IPCS-国际化学安全卡(ICSC),网站:http://www.ilo.org/dyn/dyn/scc/showcard.home hsdb-危险物质数据库,网站:https://ttpsnet.nlm.nih.gov/nih.gov/newtoxnet/nodect on intocation in intocation in intocation in intocation in intocation in intocation in intocation intocation in intocation in cancely of Carly -HSDMCMIAT cance: http://www.iarc.fr/ eChemPortal - The Global Portal to Information on Chemical Substances by OECD, website: http://www.echemportal.org/echemportal/index?pageID=0&request_locale=en CAMEO Chemicals, website: http://cameochemicals.noaa.gov/search/simple ChemidPlus,网站:http://chem.sis.nlm.nih.gov/chemidplus/chemidlite.jsp erg-美国交通部的紧急响应指南,网站:http://wwwwwww.phmsa.phmsa.dot.gov/hazmat/hazmat/library/library/library/library/library/library/library gestis-dermane gestis-hazard-hazard-hazardase neblite neblite nepental actasese: http://www.dguv.de/ifa/gestis/gestis-stoffdatenbank/index-2.jsp echa-欧洲化学局 - 网站:https://echa.europa.eu/


AER技术选修课清单
overy学期)423复合材料•在426个设计/结构中•432个控件中的AER•IN 433 Dynamics/Control*•in 442 V/Stol流体动力学•在448 Fluid Dyn中。马赫涡轮增压。•在451个天体动力学中•在452 Intoas Interoas Investment&Dive AnalysisSyst。•AER 471安全与驾驶修正案•480个超声波nounds评估中的AER。 481风能•在483 Aeroics 415/AER中,433中可以适用于技术选举信用,另一个必须将需要毕业的管理。组。)技术/工程 - 3个游泳学分
格鲁吉亚的物流业 - Assolombarda
大量大公司在该州拥有或租赁专用仓库设施。经确认,佐治亚州有 192 个大型仓库设施,面积超过 100,000 平方英尺或拥有 100 名员工。下页是显示这些设施位置的州地图,附录中列出了这些设施及其所在城市和产品分布情况。面向消费者的零售商,如拥有 9 个直营或外包门店的沃尔玛、拥有 3 个门店的 K-Mart、Target、百思买和 Pier 1 都拥有大型设施。面向行业的供应商,如 Kubota Tractors、Orgill Brothers、Sylvania Lighting Products、Graybar Electric、Daewoo Heavy Industries America、Dyn Corp. 和 Tenneco Packaging,也位于该州。
使用PCM热能存储推进可再生能源
图1显示了与冰箱9氨水冷却器集成的冰川系统的示意图。TES具有现有的氨冷藏量,以优化主要生产环境中的过程冷却技术。ThermCold Dyn 900 TES单元提供2.6 MWH(电池等效电池的650 kWh)储能。冰川选定的PCM 0(0˚CPCM)作为此应用程序的最佳PCM,Dynalene HC30作为HTF。与TES系统结合使用,开发了高级控制预测算法(ACFA)。ACFA的实施是为了预测热负载,电力要求和电力成本,以管理充电和排放事件并降低电力成本。预测价格遵循国家能源市场(NEM)在线发布的建议零售价(RRP)。
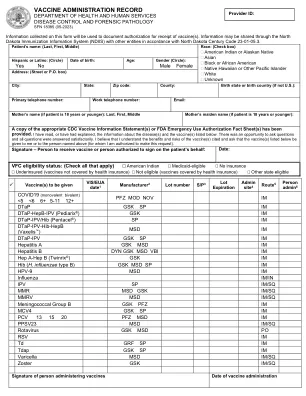
疫苗接种记录
1. VIS/EUA 日期:记录相应疫苗信息声明 (VIS) 或紧急使用授权 (EUA) 说明书的发布日期(如适用)。如果 VIS 或 EUA 说明书是在接种疫苗日期以外的日期提供的,还应记录将其提供给患者或负责患者的个人的日期。 2. 制造商:AZ = 阿斯利康、DYN = Dynavax、GSK = 葛兰素史克、GRF = Grifols、MSD = 默克公司、MOD = Moderna、NV = 诺华、NOV = Novavax、PFZ = 辉瑞、SP = 赛诺菲巴斯德、SEQ = Seqirus、VBI = VBI Vaccines, Inc 3. 注明国家供应(即公共)还是私人购买:S = 国家供应、P = 私人购买 4. 接种疫苗的部位:LA = 左臂、RA = 右臂、LT = 左大腿、RT = 右大腿 5. 接种途径:ID = 皮内、IM = 肌肉注射、IN = 鼻内、PO = 口服、SQ = 皮下 6. 疫苗接种人员的签名或姓名首字母:如果多人接种疫苗,可使用
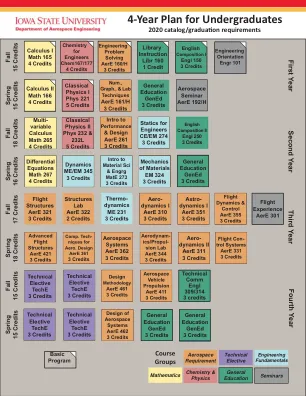
本科生四年计划
(A) 航空航天选修课 (3):推进 - AerE 412、实验力学 - AerE417、结构 - AerE 422、复合材料 - AerE 423、设计/结构 - AerE 426、控制 - AerE 432、空间动力学与控制 - AerE 433、垂直/短距起降 - AerE 442、计算机流体动力学 - AerE 446、涡轮机器 - AerE 448、天体动力学 - AerE 451、多学科设计优化简介 - AerE 463、航天器系统 - AerE 464、大型复杂工程系统。 - AerE 468,航空安全/驾驶 - AerE 471,风能 - AerE 481 (B) 技术/工程选修课 (3):从系批准的列表中选择;可以使用 (A) 组课程来满足此要求。课程可能需要预先获得 AER E 课程委员会的批准 (C) 职业 (6):从 (A) 或 (B) 中的课程或 ISU 目录中的 300/400/500 级课程中选择。课程可能需要预先获得 AER E 课程委员会的批准