XiaoMi-AI文件搜索系统
World File Search SystemEmb

KERN EMB 200-3
调节选项 使用外部砝码调节 建议调节砝码 200 g (F1) 可能的校准点 200 g 稳定时间 2.5 s 预热时间 120 分钟 1/3 处的偏心负载 [最大] 0.005 g 最大蠕变 (15 分钟) 10 mg 最大蠕变 (30 分钟) 20 mg


EMB琼脂预期用途曙红亚甲基蓝(...
EMB琼脂预期用途的亚甲基蓝色(EMB)琼脂是一种略有选择性和差异培养基,用于从临床和非临床标本中分离,培养和分化革兰氏阴性肠菌的分离,培养和分化。摘要曙红亚甲基蓝色(EMB)琼脂最初是由Holt-Harris和Teague开发的。eosin Y和亚甲基蓝是这些介质中掺入的两种染料。该配方在乳糖发酵和非乳糖发酵微生物的菌落之间产生了锐利而独特的分化。原理培养基包含曙红和亚甲基蓝色染料,这些染料在有限程度上抑制革兰氏阳性细菌。此外,这些染料还用作微生物对乳糖/蔗糖发酵响应的差异指标。蔗糖作为典型的乳糖发酵,革兰氏阴性芽孢杆菌的替代碳水化合物来源,有时可能不会发酵乳糖或可能缓慢发酵。乳糖发酵罐将降低培养基的pH值,从而导致由于甲基蓝欧染料染料复合物吸收而形成紫色的黑菌落,而乳糖非因子可能会通过氧化脱氨酸来提高周围培养基的pH值,从而溶解甲基蓝色蛋白质复合物中的甲基蓝色蛋白质复合物,从而在无色的上溶解了甲基化的蛋白质。配方 *成分G/L pryptone 10.0磷酸二磷酸二硫酸2.0乳糖5.0蔗糖5.0 Eosiny 0.4甲基蓝色0.065琼脂13.5最终pH(在25°C下)7.2±0.2 *调整为适合性能参数。储存和稳定存储在紧密闭合的容器和2°C-8°C下制备的培养基中脱水的培养基脱水。2。避免冷冻和过热。在标签上到期日之前使用。打开后,保持粉末状培养基闭合以避免补水。样品水样和临床样品的类型。样品收集和处理确保所有样品都正确标记。按照确定的准则遵循适当的技术来处理样品。某些样品可能需要特殊处理,例如立即制冷或免受光的保护,遵循标准程序。样品必须在允许的持续时间内存储和测试。使用后,必须在丢弃前高压灭菌对受污染的材料进行消毒。指示1。将35.96克粉末悬浮在1000毫升纯化 /蒸馏水中。彻底混合直至悬浮液均匀。3。频繁搅拌热以完全溶解粉末。避免过热。4。根据经过验证的循环,通过在121°C(15 psi)的121°C(15 psi)进行消毒15分钟。5。冷却至50°C,然后摇动培养基以氧化甲基蓝色并悬挂絮凝沉淀物。6。倒入无菌石油中。
7.01.153自体脂肪嫁接的脂肪衍生的干细胞
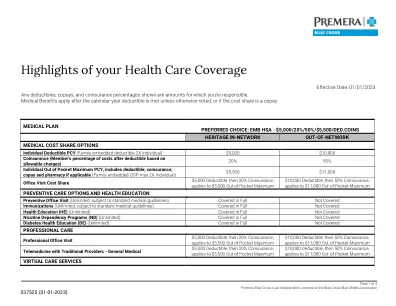
歧视违反法律蓝十字(Premera)法律符合适用的联邦和华盛顿州民权法,并且不基于种族,颜色,国籍,年龄,年龄,残疾,性别,性别认同或性取向来歧视。premera不会因为种族,颜色,国籍,年龄,残疾,性别,性别认同或性取向而排除人或对待不同的人。Premera为残疾人提供免费的辅助和服务,以与我们有效沟通,例如合格的手语解释者和书面信息(大型印刷,音频,可访问的电子格式,其他格式)。Premera为主要语言不是英语的人提供免费语言服务,例如合格的口译员和其他语言编写的信息。如果您需要这些服务,请联系民权协调员。If you believe that Premera has failed to provide these services or discriminated in another way on the basis of race, color, national origin, age, disability, sex, gender identity, or sexual orientation, you can file a grievance with: Civil Rights Coordinator ─ Complaints and Appeals, PO Box 91102, Seattle, WA 98111, Toll free: 855-332-4535, Fax: 425-918-5592,TTY:711,电子邮件applapsdepartmentinquiries@premera.com。您可以亲自或通过邮件,传真或电子邮件提出申诉。如果您需要提出申诉的帮助,则可以使用民权协调员来为您提供帮助。投诉表格可在http://www.hhs.gov/ocr/office/file/index.html上找到。投诉表可从https://fortress.wa.gov/oic/onlineservices/cc/pub/complaintinformation.aspx获得。您还可以通过https://ocrportal.hh.hhs.gov/ocr/portal/portal/lobby.jsf或通过邮件或电话在:美国卫生和人类服务部:2000年独立的Ave Ave Ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave ave> https:// hever和电话,heve a hevery and of formim affermit fornove有,以上是: 1-800-368-1019,800-537-7697(TDD)。您还可以通过保险专员投诉门户办公室向华盛顿州办公室提出民权投诉,网址为https://www.insurance.gov/file-complaint-complaint-complaint-or-conlaint-or-check-your-complaint-status,或通过电话为800-562-692-6900,3600-586-024.241(tdd)。

2023-2026 年经济战略
支持少数族裔企业 (EMB) 对英国经济的贡献,可使 GVA 从 250 亿英镑增加四倍至 1000 亿英镑*。报告指出:“据估计,25 万家少数族裔主导的企业每年为英国经济贡献约 250 亿英镑。EMB 具有强烈的发展野心;它们大量参与出口活动,并且比非 EMB 更有可能参与各种形式的创新。EMB 还通过为被排除在劳动力市场之外的边缘群体提供就业机会、充当新移民社区的重要社会咨询中心以帮助他们融入社会、提供广泛的产品和服务、振兴贫困城市地区以及积极塑造英国城市的文化多样性和吸引力,做出了重要的社会和文化贡献 6”。

2023-2026 年经济战略
支持少数族裔企业 (EMB) 对英国经济的贡献,可使 GVA 从 250 亿英镑增加四倍至 1000 亿英镑*。报告指出:“据估计,25 万家少数族裔主导的企业每年为英国经济贡献约 250 亿英镑。EMB 具有强烈的发展野心;它们大量参与出口活动,并且比非 EMB 更有可能参与各种形式的创新。EMB 还通过为被排除在劳动力市场之外的边缘群体提供就业机会、充当新移民社区的重要社会咨询中心以帮助他们融入社会、提供广泛的产品和服务、振兴贫困城市地区以及积极塑造英国城市的文化多样性和吸引力,做出了重要的社会和文化贡献 6”。
文化媒体
bacteria against gram-positive bacteria .In addition, EMB agar is useful in isolation and differentiation of the various gram- negative bacilli and enteric bacilli, generally known as coliforms and fecal coliforms respectively The bacteria which ferment lactose in the medium form colored colonies, while those that do not ferment lactose appear as colorless colonies EMB agar is used in water quality tests to distinguish coliforms and粪便大肠菌群在水样中表明可能的致病微生物污染。EMB琼脂还用于区分结肠型 - 肾小球 - 衰弱组中的生物:埃切利希菌大肠菌菌落具有绿色的金属光泽,并带有黑暗的中心。

材料基因组学寻找聚变结构材料中可能吸收氦的纳米相
民用聚变需要能够承受聚变等离子体反应堆内部恶劣环境的结构材料。结构材料通常在 14.1 MeV 快中子下嬗变,产生氦 (He),而氦会使晶界 (GB) 网络变脆。本文表明,具有原子级自由体积的中子友好且机械强度高的纳米相可以具有低 He 嵌入能 emb 和 > 10 at.% He 吸收能力,并且在抵抗辐射损伤和蠕变的基础上特别有利于吸收 He,前提是它们具有与基质相的热力学兼容性、令人满意的平衡润湿角以及足够高的熔点。初步实验证明, emb 是纳米异相材料中 He 屏蔽效力的良好从头算预测因子,因此, emb 被用作计算筛选的关键特征。在此背景下,列出了一系列有望成为良好 He 吸收纳米相的可行化合物,其中考虑了 emb 、中子吸收和活化截面、弹性模量、熔化温度、热力学兼容性以及纳米相的平衡润湿角(以 Fe 基质为例)。
Mayo:概述 +更新
o样品是𝑎𝑥,𝑏𝑥=𝑎𝑥𝑠𝑥 +𝑒𝑥,用𝑎𝑥,𝑏𝑥∈𝑅=ℤ=ℤ[𝑋]/(𝑋𝑋 + 1)o定义系数嵌入EMB:𝑅𝑅→ℤ𝑞; Emb a X =𝑎0𝑎1…𝑎𝑎。o多项式乘法=乘以偏斜循环矩阵𝐀= skew-