XiaoMi-AI文件搜索系统
World File Search SystemFIR
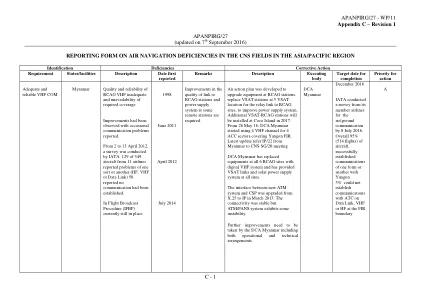
亚太地区 CNS 领域空中航行缺陷报告表
制定了一项行动计划,以升级 RCAG 站的设备,更换 5 个 VSAT 位置的 VSAT 站,以便中继链接到 RCAG 站点,从而改善供电系统。2017 年将在 Coco Island 安装额外的 VSAT-RCAG 站。从 2016 年 5 月 26 日起,缅甸 DCA 开始使用 4 个 VHF 频道为覆盖仰光 FIR 的 4 个 ACC 扇区供电。最新更新请参阅缅甸向 CNS SG/20 会议发送的 IP/22 缅甸 DCA 已将所有 6 个 RCAG 站点的设备替换为数字 VHF 系统,并为所有站点提供了 VSAT 链路和太阳能供电系统。新 ATM 系统与 CSP 之间的接口于 2013 年 3 月从 X.25 升级到 IP。连接稳定,但 ATM/FANS 系统表现出一些不稳定性。缅甸 DCA 需要进一步改进,包括运营和技术安排
亚太地区 CNS 领域空中导航缺陷报告表
制定了一项行动计划,以升级 RCAG 站的设备,更换 5 个 VSAT 位置的 VSAT 站,以便中继链接到 RCAG 站点,从而改善供电系统。2017 年将在 Coco Island 安装额外的 VSAT-RCAG 站。从 2016 年 5 月 26 日起,缅甸 DCA 开始使用 4 个 VHF 频道为覆盖仰光 FIR 的 4 个 ACC 扇区供电。最新更新请参阅缅甸向 CNS SG/20 会议发送的 IP/22 缅甸 DCA 已将所有 6 个 RCAG 站点的设备替换为数字 VHF 系统,并为所有站点提供了 VSAT 链路和太阳能供电系统。新 ATM 系统和 CSP 之间的接口于 2013 年 3 月从 X.25 升级到 IP。连接稳定,但 ATM/FANS 系统表现出一些不稳定性。缅甸 DCA 需要采取进一步的改进措施,包括运营和技术改进

AN9603:数字滤波器简介 - Renesas
二维操作主要用于改变图像的大小和形状,或在二维中进行滤波。后者的操作包括高通滤波器(用于锐化所有方向的边缘)或低通滤波器(用于限制高频噪声或故意柔化边缘)。一个重要的例子是图像调整大小,其中输入图像被重新采样为不同大小的输出图像。在减小图像尺寸时,需要进行滤波,因为简单地垂直和水平下采样(丢弃像素)会产生不可接受的混叠。二维滤波器可以由一维滤波器制成(图 12)。在这里,HSP43168 双 FIR 滤波器在水平下采样之前提供水平频带限制。其多速率功能使其能够执行整个抽取操作。然后使用 HSP48908 二维卷积器作为三系数垂直滤波器,在垂直下采样之前减少垂直带宽。
石油制造2
fibox Bluid stetaagaives Fupiprive Faxipa Fibro Floin Floin Vion。 div>File Flutec Fafnier Flytton GMBH FILE FLAIL FILE FLAIL FILE FILE FOAGEIN FOABLE FABRY FOARNO FARRY FEAR Faxboo Farval Fireye Faoll Faolhand Fauke Faughs Fairy Firsk Fedright Fedsal Fenner Fenner Fenm Fuse Ferropan Festo FF T Fgh CONTROLS FIARM FIAT DIV>File Flutec Fafnier Flytton GMBH FILE FLAIL FILE FLAIL FILE FILE FOAGEIN FOABLE FABRY FOARNO FARRY FEAR Faxboo Farval Fireye Faoll Faolhand Fauke Faughs Fairy Firsk Fedright Fedsal Fenner Fenner Fenm Fuse Ferropan Festo FF T Fgh CONTROLS FIARM FIAT DIV>
1 StepUP2 GS2 FLT 概要说明 - Insights IAS
在民主框架下。Q2。煽动叛乱法必须修订,但必须保留在印度的法典中。评论。10M 方向:Qn 基于最高法院最近对煽动叛乱的判决。介绍煽动叛乱法及其目的。接下来,说明为什么必须修订。举例证明你的观点。然后说明为什么应该保留而不是废除。给出理由。以平衡的观点结束。简介 最近,最高法院裁定,在联邦政府重新审议该条款之前,应有效暂停实施已有 152 年历史的《印度刑法典》第 124A 条下的煽动叛乱法。它还命令中央政府和各邦政府在重新审议该条款期间,不得登记任何 FIR、继续任何调查或根据该条款采取任何强制措施。 主体 煽动叛乱法 煽动叛乱法是从殖民地印度带到独立印度的众多宪法前法律之一。根据印度
引用了原始发表的论文(记录的版本):Zhang,C.,Shi,M.,Kim,W。等(2022)。发现针对PKL
一项生命实验室科学,KTH-瑞典B皇家技术研究院,瑞典B皇家技术学院,B北部大学,450001,亨南省郑州大学教育部,郑州大学教育部高级药物准备技术的主要实验室瑞典d Atat€Urk大学医学院医学药理学系,25240年,Erzurum,土耳其E e e e Erzurum E,兽医学系,兽医学院,阿塔图尔克大学,Erzurum,25240,土耳其,土耳其F,Firke Intralies,Erzurum Truncator,25200 er er turkey Erlime groum groum,Turkey groum,Turkey gokurum,Turke ful ful Fir Full Full Full Full Full Full Full Full Fire Ercult and Genetics,伊斯坦布尔,土耳其H伊斯坦布尔,夏尔默斯技术大学,哥德堡,哥德堡I大学,瑞典I医学生物学系,医学系,阿塔特·欧克大学,土耳其Erzurum,土耳其Erzurum,Turkey j ost-microbiome互动中心一项生命实验室科学,KTH-瑞典B皇家技术研究院,瑞典B皇家技术学院,B北部大学,450001,亨南省郑州大学教育部,郑州大学教育部高级药物准备技术的主要实验室瑞典d Atat€Urk大学医学院医学药理学系,25240年,Erzurum,土耳其E e e e Erzurum E,兽医学系,兽医学院,阿塔图尔克大学,Erzurum,25240,土耳其,土耳其F,Firke Intralies,Erzurum Truncator,25200 er er turkey Erlime groum groum,Turkey groum,Turkey gokurum,Turke ful ful Fir Full Full Full Full Full Full Full Full Fire Ercult and Genetics,伊斯坦布尔,土耳其H伊斯坦布尔,夏尔默斯技术大学,哥德堡,哥德堡I大学,瑞典I医学生物学系,医学系,阿塔特·欧克大学,土耳其Erzurum,土耳其Erzurum,Turkey j ost-microbiome互动中心

使用药物重新定位靶向PKLR的治疗剂
一项生命实验室科学,KTH-瑞典B皇家技术研究院,瑞典B皇家技术学院,B北部大学,450001,亨南省郑州大学教育部,郑州大学教育部高级药物准备技术的主要实验室瑞典d Atat€Urk大学医学院医学药理学系,25240年,Erzurum,土耳其E e e e Erzurum E,兽医学系,兽医学院,阿塔图尔克大学,Erzurum,25240,土耳其,土耳其F,Firke Intralies,Erzurum Truncator,25200 er er turkey Erlime groum groum,Turkey groum,Turkey gokurum,Turke ful ful Fir Full Full Full Full Full Full Full Full Fire Ercult and Genetics,伊斯坦布尔,土耳其H伊斯坦布尔,夏尔默斯技术大学,哥德堡,哥德堡I大学,瑞典I医学生物学系,医学系,阿塔特·欧克大学,土耳其Erzurum,土耳其Erzurum,Turkey j ost-microbiome互动中心一项生命实验室科学,KTH-瑞典B皇家技术研究院,瑞典B皇家技术学院,B北部大学,450001,亨南省郑州大学教育部,郑州大学教育部高级药物准备技术的主要实验室瑞典d Atat€Urk大学医学院医学药理学系,25240年,Erzurum,土耳其E e e e Erzurum E,兽医学系,兽医学院,阿塔图尔克大学,Erzurum,25240,土耳其,土耳其F,Firke Intralies,Erzurum Truncator,25200 er er turkey Erlime groum groum,Turkey groum,Turkey gokurum,Turke ful ful Fir Full Full Full Full Full Full Full Full Fire Ercult and Genetics,伊斯坦布尔,土耳其H伊斯坦布尔,夏尔默斯技术大学,哥德堡,哥德堡I大学,瑞典I医学生物学系,医学系,阿塔特·欧克大学,土耳其Erzurum,土耳其Erzurum,Turkey j ost-microbiome互动中心

第 86 空运联队 (美国陆军航空队) o 第 37 空运中队
. 764 ESS . 700 coNS . 86 SFS(轮班员工除外) o 569 USFPS(轮班员工除外) o 435 CTS . 721 APS(车间协议适用于附件中姓名列出的所有员工) o 721 AMXS/ 721 AMOG/ 721 MSS o 2l OWS . 691 COS o I CMXS . AFOSI - 5 FIR Det 501 和 Det 515 . AFIMSC/DeI 4 o AFICC/KU o 19 EWS o 603 ACS o HQ USAFE/CC . HQ USAFE/PA r HQ USAFE/JA . HQUSAFE/FM o HQ USAFE/AI o HQ USAFE/A4 o 4 战斗训练 SQ o USAFE 航空邮政 SQ o 3 空军 o DODIG、DCIS . USAFE 指挥工程委员会 (全职释放成员) o 拉姆施泰因 I 工程委员会 (全职释放成员和秘书)

基于LIDAR的在线导航算法的自治
摘要:在本文中,我们提出了一种新的方法,用于在农业中农作物行之间的自主机器人导航。通过将2D光检测和范围(LIDAR)数据投影到机器人的运动方向上,以执行具有噪声(DBSCAN)的应用程序的一维空间聚类来实现。通过将DBSCAN的虚拟地标与机器人的位置相结合,从粒子过滤器中更新了映射和定位(MAL)。此方法映射的结果并在一次扫描中同时估算机器人的位置。每个机器人的位置取决于当前扫描和以前的扫描的LIDAR数据信息。数据关联是通过将许多连续扫描和卡尔曼过滤器组合在一起的数据来实现全局路径。通过组合本地位置创建的全局轨迹允许机器人实时自动导航,而无需经历从裁剪领域收集所有数据的先前阶段。本文还使用不同的参数进行FIR滤波器校正,以增强所提出的方法的有效性。

Dolphicam 2产品规格
软件DolphICAM2软件将每个传感器元素的数据实时组合到超声图像中。除了来自单个传感器元素的信号外,该软件还可以通过所检查的材料可视化垂直和水平横截面和3D视图。现代直观的用户界面使得从Dolphicam2开始变得容易。同时,高级功能(例如FIR滤波器和Total Focusing方法)可以帮助经验丰富的用户检测和分类最佳的材料功能。开放的,记录的数据文件格式允许用户将其数据集导出到例如matlab,或保存以备将来参考。有或没有编码器指导的有或没有编码器指导的缝制模式,可以轻松检查更大的区域,并且报告功能可以轻松保存特别感兴趣的图像并将它们组合到Microsoft Word文档中。最后但并非最不重要的一点是,在常规DolphICAM2应用程序不是正确的解决方案的情况下,多平台DolphICAM2 SDK可用于从DolphICAM2中控制和获取数据。