XiaoMi-AI文件搜索系统
World File Search SystemFloat
b.sc.计算机科学专业,未成年人...
4。函数和数组(7个讲座)功能的效用,按值调用,逐次调用,函数返回值,void函数,内联函数,返回数据类型,函数参数,函数参数,声明和函数的声明和定义之间的区分,司令部线路参数/参数在函数中,功能,功能,功能与可变量的参数数字。Creating and Using One Dimensional Arrays (Declaring and Defining an Array, Initializing an Array, Accessing individual elements in an Array, Manipulating array elements using loops), Use Various types of arrays (integer, float and character arrays / Strings) Two-dimensional Arrays (Declaring, Defining and Initializing Two Dimensional Array, Working with Rows and Columns), Introduction to Multi-dimensional arrays, return语句,返回值及其类型,带有数组的字符串处理,字符串处理功能,递归
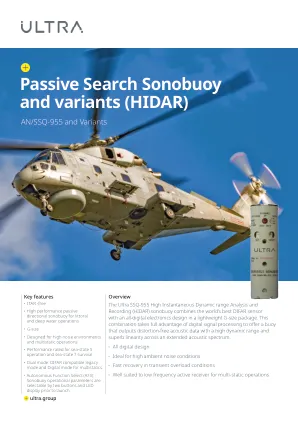
被动搜索声呐浮标及其变体 (HIDAR) - Ultra Group
从飞机上释放后,降落伞将下降速度限制在大约 30 米/秒。入水后,将部署一个水面浮标,其中包含用于声学数据遥测的甚高频发射器。全向和定向声学传感器信号被传输到机载或舰载声学处理器,用于对窄带、宽带和瞬态潜艇声发射进行被动检测。浮标还将以多静态或主动辅助角色检测低频主动发射和回声。

ICS 系列 6ICS200
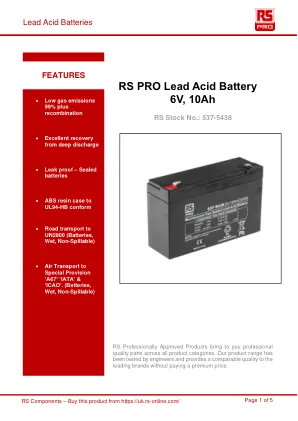
标称电压 6 V 电池数量 3 额定容量(25 ℃ ) 200 Ah - 20A 持续 10 小时至 1.80V/cell 浮充电压 2.25Vpc @ 25 ℃ 循环和均衡充电电压 2.35Vpc @ 25 ℃ 内阻 1 . 60 m Ω(符合 IEC 60896-21) 短路电流 5598A(符合 IEC60896-21) 最大充电电流无限制,否则如果 T>25 ℃ 则最大为 50A 25 ℃ 时自放电率每月小于 3%

管理的定量分析第10版PDF免费下载
**管理研究材料的定量技术**这些笔记涵盖了在管理决策情况下使用的各种数学模型和计算机软件包。重点是理解概念,表述和解释。关键主题包括:**线性编程:** *问题的表述 *图形解决方案(多个最佳解决方案,不可行性,无限解决方案) *简单方法(特殊案例,Big-M方法,两相方法) *二元性(强调配方和经济诠释) **运输问题:***通过各种方法的配方和解决方案(N.W.Hiller和G.J. Liebermann,“操作研究简介”管理说明PDF: *免费的软件工程项目,包括2023年初学者,中间人和专家的源代码(URL:关于管理的定量分析: *教科书旨在本科生和研究生的教科书,旨在对构建商业分析,构建构建的构建,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机。部分而不破坏材料内容:1。 定量分析简介2。 概率概念和应用程序3。 决策分析4。 回归模型5。 预测6。 库存控制模型7。 线性编程模型:图形和计算机方法8。 线性编程应用程序9。 项目管理12。Hiller和G.J.Liebermann,“操作研究简介”管理说明PDF: *免费的软件工程项目,包括2023年初学者,中间人和专家的源代码(URL:关于管理的定量分析: *教科书旨在本科生和研究生的教科书,旨在对构建商业分析,构建构建的构建,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机,并构建计算机。部分而不破坏材料内容:1。定量分析简介2。概率概念和应用程序3。决策分析4。回归模型5。预测6。库存控制模型7。线性编程模型:图形和计算机方法8。线性编程应用程序9。项目管理12。Corner Rule, least cost method, Vogel's Approximation Method (VAM), Modified Distribution Method) * Special cases (multiple solutions, maximization case, unbalanced case, prohibited routes) * **Assignment Problem:** * Hungarian method * Special cases (multiple solutions, maximization case, unbalanced case, restrictions on assignment) * **Project Management:** * Basic concept and construction of the network diagram * Critical path analysis, float, and slack analysis (total float, free float, independent float) * Probability consideration in program evaluation and review technique (PERT) * Time-cost optimization * **Decision-making Environment:** * Construction of payoff table and opportunity loss table * Decision under uncertainty (expected monetary value (EMV), expected opportunity loss (EOL)) * Expected value of perfect information (EVPI) * **Markov Chains:** * Markov process, total productive maintenance (TPM) * Predicting future market shares, equilibrium conditions, limiting probabilities * Chapman-Kolmogrov equation * **Decision under Conflict:** * Game theory and two-person zero-sum games * Maximin-minimax principle * Games without saddle point (mixed strategy, dominance rule) * Reduction of m x n game and solution of 2×2, 2 × s, and r x 2 cases by graphical method Quantitative Techniques for Management注意: *来源: + files.wordpress.com + theintactone.com + Academia.edu *参考书列表: + N. D. Vohra,“定量管理,” Tata McGraw Hill + Hamdy A Taha,“运营研究:简介” + F.S.运输,分配和网络模型10。整数编程,目标编程和非线性编程11。等待线和排队理论模型13。仿真建模14。马尔可夫分析15。Statistical Quality Control Appendices: * Areas Under the Standard Normal Curve * Binomial Probabilities * Values of e - λ for Use in the Poisson Distribution * F Distribution Values * Using POM-QM for Windows * Using Excel Index of Modules =============== Module 1 - Analytic Hierarchy Process Module 2 - Dynamic Programming Techniques Module 3 - Decision Theory with Normal Distribution Insights Module 4 -游戏理论原理模块5-数学基础:决定因素和矩阵模块6-基于微积分的优化策略模块7-线性编程模块8-运输,分配和网络算法解决方案

马拉松式驱动 / M12V100PC工业... < / div>
马拉松驱动器在良好的网格条件下表现出卓越的性能,并且在浮动操作中显示出可靠的备份功率。其其他强大功能在这些市场中提供了更多的功能。他们支持诸如5G部署和正在进行的网络致密化之类的挑战,这些挑战需要小包装中的专门电池,并且耐受性较高的寿命更长。随着循环寿命的增强,马拉松式动力汽车还解决了新趋势,例如分散的能源解决方案以及对更高可持续性的需求。
MUS 4.3测试和充电
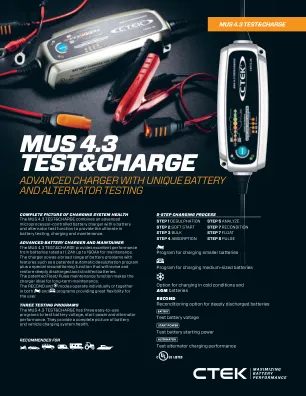
高级电池充电器和维护器MUS 4.3测试和充电可提供额定的电池,额定功率为1.2AH至160AH,以进行维护。充电器通过诸如专利自动脱硫程序以及特殊的重新调节功能等功能解决了广泛的电池问题,该功能将恢复并恢复深度放电和分层电池。专利的浮点/脉冲维护功能使充电器非常适合长期维护。重新束缚和模式在两者中单独或一起运行,并且程序为用户提供了极大的灵活性。

马拉松驱动 / M12V155PC工业...- rivion < / div>
马拉松驱动器在良好的网格条件下表现出卓越的性能,并且在浮动操作中显示出可靠的备份功率。其其他强大功能在这些市场中提供了更多的功能。他们支持诸如5G部署和正在进行的网络致密化之类的挑战,这些挑战需要小包装中的专门电池,并且耐受性较高的寿命更长。随着循环寿命的增强,马拉松式动力汽车还解决了新趋势,例如分散的能源解决方案以及对更高可持续性的需求。

MUS 4.3 测试和充电
高级电池充电器和维护器 MUS 4.3 TEST&CHARGE 可为额定容量为 1.2Ah 至 160Ah 的电池提供出色的维护性能。该充电器通过专利的自动脱硫程序和特殊的修复功能等功能解决了各种电池问题,这些功能可以恢复和修复深度放电和分层的电池。专利的浮动/脉冲维护功能使该充电器成为长期维护的理想选择。RECOND 和模式可在和程序中单独或同时运行,为用户提供极大的灵活性。