XiaoMi-AI文件搜索系统
World File Search SystemGCPS
IKONOS 高分辨率卫星图像地面点的精度评估
摘要 为了评估综合全球定位系统 (GPS)、惯性导航系统 (INS) 和高分辨率线阵 CCD 传感器数据所得地面点的几何精度,本文介绍了光束法平差的数学模型以及地面点可达精度与地面控制点 (GCPS) 数量和分布、GCPS 和检查点的图像测量误差以及轨道拟合多项式阶数的关系的实验结果。介绍在俄亥俄州中部麦迪逊县建立的大地控制网,用于测试模拟的新一代 IKONOS 高分辨率卫星影像的精度。基于机载高分辨率立体相机 [I~RSC] 系统和模拟的 IKONOS 影像(SpaceImaging, Inc.),进行了各种实验方案,涉及不同立体模型配置的几何强度、GCPS 数量和分布的影响以及 GCPS 和检查点的图像测量误差的影响。最后通过本次试验研究提出了一些提高地面点几何精度的建议和建议。
2025 年 1 月 31 日 日历变更 PreK/K 注册
从 2025 年 2 月 10 日*上午 8:00 开始,加勒特县公立学校 (GCPS) 将在线接受 2025-26 学年 4 岁儿童学前班课程的申请。
利用高性能单光子探测器实现量子计算机、网络和通信
• 高宽带检测效率(接近 1,许多 𝝀) • 超高时间精度(数十皮秒) • 超低暗计数率(< 1 cps) • 超高检测率(> 1 Gcps) • 出色的 PNR 性能
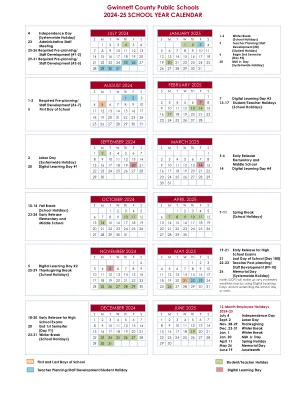
格温内特县公立学校2024-25学年日历
19-21高中考试的早期发行21上学的最后一天[第180天] 22-23教师课后/员工发展[#9-10] 26阵亡将士纪念日(系统范围内的假期)注意:GCPS将使用数字学习日和/或延长学日或一年来弥补任何昂贵的天气。
SNSPD 冷读:活动和计划
作为光子探测器:• 可用于从深紫外到中红外时间相关单光子计数的最高性能探测器• 在 1550 nm 处已证实的探测效率高达 98%• 时间抖动低于 3 ps• 有效的零暗计数率• 本征光子数分辨率• 阵列中最大计数率超过 1 Gcps

自动处理大量图像以进行 2D/3D 建模
当分析从地面(例如固定摄像站)或地面以上(例如无人机、飞机或卫星)在同一位置收集的图像的时间序列时,没有必要对所有帧进行地理配准。与摄影测量光束法区域网平差一样,GCP 是在整个图像块的较小子集上测量的,而其他 GCP 则在它们之间和相对于它进行配准。如果使用间接地理配准技术,则使用已知 GCP 手动对一幅图像进行地理编码(该图像通常称为“主”或“参考”图像),然后手动或自动将该系列的所有其他图像与其配准。另一方面,当使用直接地理配准技术时,所有图像都已进行地理配准,只需要几个 GCP 来纠正一些残留偏差。不幸的是,这种方法不适用于任何类型的应用,例如近距离摄影测量(Luhmann 等人2014 )。在其他情况下,它可能仅提供近似地理编码,用于实例化其他地理参考技术。这是使用无人机记录的大多数摄影测量块的情况(Colomina 和 Molina 2014;Granshaw 2018a)或用于分析卫星图像,其中直接地理编码不够准确。当需要间接地理参考方法时,假设总是需要一些外部约束,则仅在(小)图像子集上测量 GCP 然后将其余数据联合注册的选项对于减少处理时间和限制操作员工作量确实具有战略意义。因此,近年来,已经开发了几种自动化方法来实现这一目的。米兰理工大学建筑、建筑环境和建筑工程系 (DABC) 通过在通用框架内引导不同类型图像的配准过程,为这一主题做出了贡献。这可以称为运动结构摄影测量程序,将在下一节中讨论。

isprs-archives-XLII-2-W9-93-2019.pdf
无人机摄影测量考古调查质量评估 S. Barba a , M. Barbarella b , A.Di Benedetto c , M. Fiani a , M. Limongiello a a 意大利菲夏诺 (SA) 萨勒诺大学土木工程系 (sbarba; m.fiani; mlimongiello)@unisa.it; b 意大利博洛尼亚大学土木、化学、环境和材料工程系 - ARCES maurizio.barbarella@unibo.it c 意大利罗马第三大学土木工程系 alessandro.dibenedetto@uniroma3.it 委员会 II 关键词:重投影误差、阿维拉露天剧场、3D 模型、GNSS 测量。摘要:本文报告了使用无人机 (UAV) 在阿韦利亚 (意大利阿韦利诺) 的罗马圆形剧场考古遗址进行的摄影测量调查的结果。本研究的目的是验证哪种图像采集方式(如果只有底部图像或底部加倾斜图像)与全球定位卫星系统 (GNSS) 测量地面控制点 (GCP) 的方法相结合能够在精度方面生成更好的 3D 模型,以便提取适合所需表示比例(1:100 和 1:50)的传统图形绘图(平面图、立面图和剖面图)。通过分析 GCP 上的残留物来评估地理参考的准确性;随后,对最终 3D 模型的精度进行了更详细的分析,分析了图像坐标上的残差,也称为重新投影误差。所开发的方法基于对不同模型的统计分析,这些模型是通过改变 GCP 的测量方法和获取的摄影测量照片而建立的。1.介绍我们的分析结果表明,仅使用天底图像进行摄影测量更“稳定”,并且 nRTK 技术可以实现与静态测量相当的结果,无论是精度还是可靠性。此外,如果在 nRTK 模式下测量 GCP,考虑到图形误差,最大表示比例为 1:100,而使用静态技术可以以 1:50 的比例描述主要细节。

飞行高度对无人机测距精度的影响...
近年来,用于采矿业 3D 地形测绘的轻型无人机 (UAV) 得到了显著发展。特别是在露天矿等复杂地形中,海拔起伏剧烈,与传统方法相比,基于无人机的测绘已证明具有经济性和更高的安全性。然而,无人机测绘复杂地形的最重要因素之一是飞行高度,由于生成的 DEM 的安全性和准确性,需要认真考虑飞行高度。本文旨在评估飞行高度对露天矿生成的 DEM 准确性的影响。为此,研究区域选在越南北部一个地形复杂的采石场。调查采用 50 m、100 m、150 m、200 m 和 250 m 五个飞行高度进行。为了评估生成的 DEM 的精度,使用了 10 个地面控制点 (GCP) 和 385 个检查点,这些检查点通过 GNSS/RTK 和全站仪方法进行了测量。通过 X、Y、Z、XY 和 XYZ 分量的均方根误差 (RMSE) 来评估 DEM 的精度。结果表明,在飞行高度小于 150 m 时生成的 DEM 模型具有较高的精度。当飞行高度从 50 m 增加到 250 m 时,10 个 GCP 的垂直 (Z) 方向的 RMSE 从 1.8 cm 增加到 6.2 cm,水平 (XY) 方向的 RMSE 从 2.6 cm 增加到 6.3 cm,而 385 个检查点的垂直 (Z) 方向的 RMSE 从 0.05 m 逐渐增加到 0.15 m。

巨石:评估机器人和载人应用的立体瞄准策略。TA Roseborough 1、AJ Sonke 2 和 MS Robinson 1、1 I
我们使用 3DF Zephyr 构建 3D 模型。对于每个序列,我们导入图像并掩盖巨石周围的区域。我们从图像中生成稀疏点云。在此阶段,我们通过创建地面控制点 (GCP) 将特征上的位置与纬度、经度和海拔值联系起来,从而对该特征进行地理参考。我们使用 30 厘米/像素的国家农业图像计划 (NAIP) 图像和 25 厘米/像素的航空激光雷达数字地形模型 (DTM) 在 ArcGIS Pro 中为每个站点标记了 3 个 GCP 位置 (图 1a) [5]。我们使用 ArcGIS Pro 确定 GCP 的坐标以及从 DTM 中提取这些位置的海拔,我们使用简单的双线性插值来完成此操作,以最好地近似该特定位置的海拔。我们导入了这些点并运行了捆绑调整;如果程序报告的不确定性 <0.01 米,我们认为这些是良好的 GCP。如果任何 GCP 残差较高,我们会调整其位置并重新导入。对 GCP 对齐感到满意后,我们继续创建密集点云、网格和纹理网格(图 1b、c)。对于所有步骤,我们都使用 3DF Zephyr 默认设置。模型完成后,我们生成了一份处理报告,其中提供了平均地面采样距离 (GSD)(我们用其作为分辨率的代理)和模型表面积等信息。我们还将计算出的相机位置导出到 ArcGIS Pro(图 1a),并使用测量工具检查到特征的位置距离以及相机位置之间的距离。我们测量了步骤之间的直线距离,并

巴西环境下高光谱图像块的辐射块调整
已在无人机中实施(Zarco-Tejada、González-Dugo 和 Berni,2012 年;Hruska 等人,2012 年;Büttner 和 Röser,2014 年;Suomalainen 等人,2014 年;Lucieer 等人,2014 年)。以 2D 帧格式原理运行的小型化高光谱成像仪是一种捕获光谱特征的新颖传感方法(Mäkynen 等人,2011 年;Saari 等人,2013 年;Honkavaara 等人,2013 年;Näsi 等人,2015 年;Aasen 等人,2015 年)。 2015)。 2D 帧格式由于其刚性的矩形几何形状和多个重叠图像而提供了强大的几何和辐射约束(Honkavaara 等人,2012 年)。该框架为无人机遥感提供了有趣的可能性,因为它可以产生比推扫式扫描,使用更少的地面控制点 (GCP) 和较低等级的惯性导航系统 (INS)。