XiaoMi-AI文件搜索系统
World File Search SystemGenerali
PO 2024-25 PET GENALL ISALLESS经济银行业务...
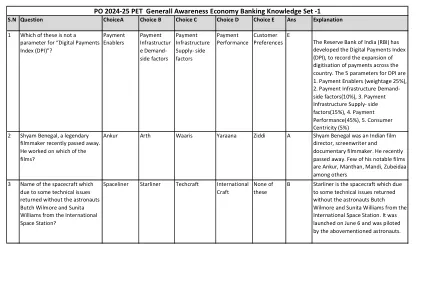
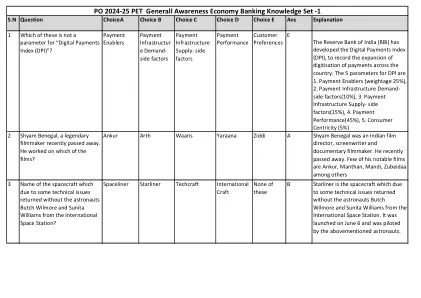
e pradhan mnatri fasal bima yojana(PMFBY)旨在为农作物的失败提供全面的保险,从而有助于稳固农民的收入。当前的企业保险公司是:1印度农业保险公司2。ICICI LOMBARD 3。HDFC ERGO通用保险公司4。iffco-tokio一般保险5。Cholamandalam MS常规保险6。Bajaj Allianz一般保险7.列车一般保险8。未来将军印度保险9。TATA AIG一般保险10。SBI常规保险11。通用Sompo一般保险
PO 2024-25 PET 一般意识经济银行...
e pradhan mnatri fasal bima yojana(PMFBY)旨在为农作物的失败提供全面的保险,从而有助于稳固农民的收入。当前的企业保险公司是:1印度农业保险公司2。ICICI LOMBARD 3。HDFC ERGO通用保险公司4。iffco-tokio一般保险5。Cholamandalam MS常规保险6。Bajaj Allianz一般保险7.列车一般保险8。未来的将军印度保险9。TATA AIG一般保险10。SBI常规保险11。通用Sompo一般保险
年度综合报告和合并...
年度综合报告中的信息是指通过实质性分析流程确定的重要主题,该流程由内部和外部利益相关者参与进行。2019 年,我们与他们一起评估了重大的社会、环境和治理变革(也称为大趋势),预计这些变革将在十年内显著改变企业、社会和自然环境,这对集团、其价值链和利益相关者来说既是风险也是机遇。考虑到新冠疫情造成的危机,2020 年,Generali 高层管理人员审查了大趋势的当前相关性及其在三个优先集群中的分布。在确定 2021 年的大趋势时,我们考虑了双重实质性的角度,从而评估了每个大趋势可能对集团产生的潜在影响以及集团可能如何通过其价值链影响它们。属于三个优先集群之一决定了集团的管理和报告方法。
道德规范 - 组织模式
索引 前言 1. 一般原则 1.1.目标 1.2。基本原则 1.3.收件人 1.4。广泛的控制和报告 1.5。监督机构的控制任务 1.6.纪律程序和制裁 1.7.报告违规行为或请求信息的程序 2. 人力资源和就业政策 3. 工作健康和安全 3.1.公司职业健康安全管理体系(SGS)3.2。接收方在健康和安全方面的义务 4. 环境政策 4.1.公司环境保护管理体系(EMS) 5. 对待第三方和业务的行为 5.1.一般原则 5.1.1.利益冲突 5.1.2.礼物或其他好处 5.2.与公共行政部门的关系 5.3。与顾问的关系 5.4。与政治和工会机构的关系 5.5。客户关系 5.6.与供应商和分包商的关系 5.7.与竞争对手的关系 5.8.与大众媒体、研究公司、行业协会和其他类似机构的关系 5.9.与社区的关系 6. 公司管理行为 6.1.与成员的关系 6.2.与审计委员会的关系 6.3。资本和股权交易 6.4.会计透明度

信息文件 2024 年广泛持股计划
依据艺术承担战略责任的经理。发行人条例第 65 条第 1 款之四规定,直接或间接地对 Eni 的规划、指导和控制拥有权力和责任的主体。就本信息文件而言,埃尼公司负有战略责任的管理人员是总经理和董事,他们直接向埃尼公司首席执行官和董事会主席汇报工作,在任何情况下,还包括董事会成员。公司管理委员会。
ESG数据情报公司Deepki在2023年通过主要里程碑加强了其全球领导地位,以产生积极的影响。
成立于2014年,Deepki开发了一种SaaS解决方案,该解决方案使用数据情报来指导房地产参与者的净零过渡。该解决方案利用客户数据来改善资产的ESG(环境,社会和治理)绩效,并最大化资产价值。Deepki在60个国家 /地区开展业务,遍布巴黎,伦敦,柏林,米兰和马德里的400多名团队成员。该公司为将军房地产,瑞士人资产经理和法国政府等客户提供服务,帮助使他们的房地产资产更加可持续。Deepki现在监视全球150万种资产,通过将其CO₂排放量减少5%,帮助其客户与巴黎协议保持一致。
2024 年排名报告
由研究公司 Guamari 出版,数字版可在网站 www.guamari.it 上查阅 2024 年 11 月完成印刷 MassimoFiameniDesign&,米兰 在以下公司的赞助下:Albini and Castelli、Borio Mangiarotti、Brancaccio Construction、Carron、Cds Construction、Cev、Cmb、Coccia Construction、Cogefa、Colombo Construction、General Construction Gilardi、Iannini Construction、De Sanctis Construction、Di Vincenzo Dino & C.、Ediltecno Restauri、Fast、Grassi & Crespi、GSE Italia、Guffanti A.、Icm、Ing. Ferrari、Mario Neri、Mengato、Mingori Engineering & Building、Mubre Construction、Nessi & Majocchi、Nigro & C. Construction、Pasqualucci Construction、Renovalo、Ricci、Roger Group、Sac、Sacaim、Secap、Sercos、Setten Genesio、Smv建筑、Strever、Techbau、Tiemme 建筑
隐私政策
Thema Energia Srl 按照欧盟法规 2016/679 中关于个人数据处理方面自然人保护的规定,通知您,您提供和获取的个人数据将按照上述法规的规定进行处理,特别是参考由此产生的权利和义务。我们还规定,为了建立和/或执行现有合同关系以及履行特定法律义务,我们需要获取您的个人数据,或者我们需要随后获取这些数据,而无需您进一步同意,这在双方签订的合同/协议和/或相关任务的分配中是隐含的。对于信息中未明确提及的任何内容,将适用 CGF(一般供货条件)的定义。数据控制者:Thema Energia Srl,注册办事处位于 Via Pietro Gori n。 2/L – 06034 位于 Foligno (PG),增值税号:03350460543,联系人为 Andrea Cicioni 博士。数据保护官:为了给您提供方便的联系点,Thema Energia 指定了一名数据保护官,您可以通过以下地址联系该数据保护官,以处理与行使 GDPR 保障的您的权利有关的所有事宜,并在利益相关方权利部分进行了描述:dpo@innovationlab.srl。或者,您可以拨打《一般供货条款》中注明的号码联系客户服务,或者访问网站上的隐私管理表格:www.themaenergia.it。
课程
t下雨•“工程研究项目的企业家分析”,那不勒斯大学费德里科二世,意大利,2016年2月29日。•2016年3月2日,意大利的那不勒斯大学Federico II的“介绍Matlab”。•“沟通和传播您的研究工作”,那不勒斯大学费德里科二世,意大利,2016年3月14日至16日。•“ Tecnologie Generali dei Metitali”,那不勒斯大学Federico II,意大利,2016年3月29日。•“制造过程的监视,那不勒斯大学费德里科二世,意大利,2016年5月24日。•“ gestione Strategica dell'innovazione”,那不勒斯大学费德里科二世,意大利,2月28日,马佐。•2017年3月30日,意大利的那不勒斯大学费德里科二世,“多尺度和多物理学”。•“高级制造的研究趋势”,那不勒斯大学费德里科二世,意大利,16-21,2018年2月。•“ FEM:从基本到工业应用到工业应用的旅程”,那不勒斯大学费德里科二世,意大利,2018年4月5日。•“ Trattamenti Supriclici”,那不勒斯大学Federico II,意大利,2018年6月7日。