XiaoMi-AI文件搜索系统
World File Search SystemGeo

引用本研究:Medjahed, SA (2024)。Runge-Kutta 方法在 GPS 轨道计算中的应用。国际工程与地理学报
在所有全球导航卫星系统 (GNSS) 应用中,确定卫星轨道是一项重要任务。在本研究中,我们介绍了 GPS 接口规范文件中给出的方程以及使用广播星历计算 GPS 卫星位置 P、速度 V 和加速度 A 的龙格-库塔方法。描述 GPS 卫星运动的微分方程的定义使我们能够将龙格-库塔方法引入 GPS 轨道计算中;该方法使用本研究中从广播星历文件中提供的开普勒元素确定的初始条件。使用拉格朗日插值法对结果进行比较,其中使用精确星历估计矢量 P、V 和 A。在本研究中测试的 9 号 GPS 卫星的位置上,在七天内在 X、Y 和 Z 轴上获得的差异不超过 2.4 m。在速度和加速度方面,差异分别约为几 mm/s 和 mm/s 2。

詹妮弗·劳伦斯及其合伙人 Urban Strategies Inc. Urbantech Consulting DS Consultants Ltd. Geo Morphix Ltd. GEI Consultants
文件:P:\PROJECTS\22-712-3056 NEYAGAWA (NEATT COMM. -OAKVILLE)\REPORTS\EIR-FSS\DRAWINGS & FIGURES\1_0 - INTRODUCTION\FIGURE 1.3_EIR 子流域区域和 FSS 研究区域.DWG 由 [ MHERRMANN ] 于 2024 年 11 月 21 日上午 9:30 修订

PHANTOM ECHOES:五眼 SDA 实验,旨在检验地球同步轨道会合和近距作战 Simon George、Andrew Ash 国防科学与技术 L
幻影回声:五眼 SDA 实验,旨在检查 GEO 会合和近距离操作 Simon George、Andrew Ash 英国国防科学技术实验室 Travis Bessell 澳大利亚国防科学技术组 James Frith 美国空军研究实验室 Lauchie Scott 加拿大国防研发中心 Jovan Skuljan 新西兰国防技术局 Roberto Furfaro、Vishnu Reddy 美国亚利桑那大学 摘要 2020 年 2 月,两艘航天器在地球静止轨道 (GEO) 进行了首次商业卫星服务会合对接,为了解飞行器的动态并使用地面和天基传感器观察此类活动提供了独特的机会。作为更广泛活动的一部分,该活动旨在展示如何将盟军传感器和处理工具集成到基于云的联合处理工作流中,以提高盟军航天器在地球同步轨道的太空安全,在五眼联盟 (FVEYs) 国家国防科学技术 (S&T) 组织开展的受限观察活动中,服务飞行器和客户飞行器均被观察为替代目标。这项名为“PHANTOM ECHOES”的实验活动通过技术合作计划 (TTCP) 下开展的研究活动,汇集了英国、美国、加拿大、澳大利亚和新西兰的能力。本文概述了 PHANTOM ECHOES 活动第一阶段开展的活动;描述 FVEY 的空间领域感知 (SDA) 工具在数据处理网络基础设施中的开发和集成进展,以及任务扩展飞行器-1 (MEV-1) 从发射到 2020 年 2 月 25 日成功与 Intelsat-901 对接的真实世界和模拟观测结果。本文还介绍了 PHANTOM ECHOES 实验的第二阶段,该实验目前正在与任务扩展飞行器-2 (MEV-2) 任务一起进行,FVEY 的 SDA 科技界正在利用该实验来积累经验并探索深空的替代替代目标,这些目标呈现出与保护地球静止轨道盟军航天器相关的任务概况。 1. 简介 地球静止轨道 (GEO) 区域被各种各样的联盟航天器占据,它们为民用和军用目的的通信、监视和导航提供关键服务。虽然地球同步轨道 (GEO) 一直因其独特的轨道几何形状而备受推崇,但地球同步轨道 (GEO) 中常驻空间物体 (RSO) 数量的不断增加对飞行安全和关键高价值资产 (HVA) 的保护产生了相关影响。随着该地区人口密度的增加,有意近距离活动的能力也日趋成熟。此外,推进和自主能力的进步也
亨利·科尼利厄斯·阿格里帕 (Henry Cornelius Agrippa) 的第四本神秘哲学书......
并由波斯人称为魔术师,其中一位古代魔术师说了几个词:Erverum Deum merita ma je s i a t e pro f e q uie e ur,& angelo s ministros Deifed v erie jus v能量在内部产生;那是地狱的诅咒,地狱的诅咒,地狱的诅咒:地狱的诅咒是真正的上帝,并且知道这个天使是牧师和牧师,他们聊天更多的是上帝的旨意,所以他已经交付了,那里有

接受日期: 21/07/2021 在线优先: 24/10/2021 结合脑基教学法与 GeoGebra (B-Geo Module) 对学生概念能力的影响
基于大脑的教学方法是一种实施基于大脑的学习 (BBL) 模型方法的策略。这种方法旨在与个人大脑的倾向和最佳功能兼容,以确保学生能够有效地学习。该模块使用与 GeoGebra 软件 (B-Geo 模块) 集成的基于大脑的教学方法来帮助学生对差异化主题的概念理解。因此,本研究旨在探索与 GeoGebra 软件集成的基于大脑的教学方法对马来西亚农村中学差异化主题概念理解的可能影响。本研究采用了准设计的前测和后测实验,涉及来自农村中学的 118 名 4 年级学生。研究人员使用整群抽样技术进行学校选择,并使用完整组进行样本选择。学校选择分为两组,即使用传统信息和通信技术 (ICT) 模块的对照组和使用 B-Geo 模块的实验组。使用的工具是差异化概念理解测试。数据分析结果显示,在使用基于大脑的教学方法并整合 GeoGebra 软件后,农村中学生对差异化主题的概念理解有所提高。

接受日期: 21/07/2021 在线优先: 24/10/2021 结合脑基教学法与 GeoGebra (B-Geo Module) 对学生概念能力的影响
基于大脑的教学方法是一种实施基于大脑的学习 (BBL) 模型方法的策略。这种方法旨在与个人大脑的倾向和最佳功能兼容,以确保学生能够有效地学习。该模块使用与 GeoGebra 软件 (B-Geo 模块) 集成的基于大脑的教学方法来帮助学生对差异化主题的概念理解。因此,本研究旨在探索与 GeoGebra 软件集成的基于大脑的教学方法对马来西亚农村中学差异化主题概念理解的可能影响。本研究采用了准设计的前测和后测实验,涉及来自农村中学的 118 名 4 年级学生。研究人员使用整群抽样技术进行学校选择,并使用完整组进行样本选择。学校选择分为两组,即使用传统信息和通信技术 (ICT) 模块的对照组和使用 B-Geo 模块的实验组。使用的工具是差异化概念理解测试。数据分析结果显示,在使用基于大脑的教学方法并整合 GeoGebra 软件后,农村中学生对差异化主题的概念理解有所提高。

岩土工程办公室 - 香港
1。范围1.1本技术指南注释(TGN)补充和更新GEO报告中给出的相关指南270(Kwan,2012)和Geo TGN No. 47(Geo,2023d)关于岩土稳定性,结构完整性和刚性碎屑障碍物的偏转器设计的细节。 1.2有关此TGN的任何反馈都应直接针对岩土工程办公室(GEO)的首席岩土工程师/ Landslip预防措施2。 2。 技术政策2.1该TGN中颁布的技术建议于2020年12月24日由Geo Geotechnical Control会议一致。 3。 相关文档3.1 GEO(2023a)。 耐碎碎片屏障设计的补充技术指南(GEO TGN 33)。 岩土工程办公室,香港,1页。 3.2 GEO(2023b)。 详细介绍了耐碎屑的屏障(GEO TGN 35)。 岩土工程办公室,香港,第8页。 3.3 GEO(2023C)。 评估抗碎片屏障设计的滑坡碎片撞击速度(GEO TGN 44)。 岩土工程办公室,香港,第4页。 3.4 Geo(2023d)。 耐碎屑壁垒的设计指南的更新(GEO TGN 47)。 岩土工程办公室,香港,第4页。 3.5 Kwan,J.S.H。 (2012)。 刚性碎片障碍的设计补充技术指南(GEO报告号 270)。 岩土工程办公室,香港,第88页。 3.6 LO,D.O.K。 (2000)。 自然地形滑坡杂物屏障设计的审查(GEO报告号270(Kwan,2012)和Geo TGN No.47(Geo,2023d)关于岩土稳定性,结构完整性和刚性碎屑障碍物的偏转器设计的细节。1.2有关此TGN的任何反馈都应直接针对岩土工程办公室(GEO)的首席岩土工程师/ Landslip预防措施2。2。技术政策2.1该TGN中颁布的技术建议于2020年12月24日由Geo Geotechnical Control会议一致。3。相关文档3.1 GEO(2023a)。耐碎碎片屏障设计的补充技术指南(GEO TGN 33)。岩土工程办公室,香港,1页。 3.2 GEO(2023b)。详细介绍了耐碎屑的屏障(GEO TGN 35)。岩土工程办公室,香港,第8页。 3.3 GEO(2023C)。评估抗碎片屏障设计的滑坡碎片撞击速度(GEO TGN 44)。岩土工程办公室,香港,第4页。 3.4 Geo(2023d)。耐碎屑壁垒的设计指南的更新(GEO TGN 47)。岩土工程办公室,香港,第4页。 3.5 Kwan,J.S.H。(2012)。刚性碎片障碍的设计补充技术指南(GEO报告号270)。岩土工程办公室,香港,第88页。 3.6 LO,D.O.K。(2000)。自然地形滑坡杂物屏障设计的审查(GEO报告号104)。岩土工程办公室,香港,第91页。 3.7 Wong,L.A.,Lam,H.W.K.,Lam,C。&Kwan,J.S.H。(2022)。关于耐碎屑障碍的设计技术开发工作(GEO报告号358)。岩土工程办公室,香港,第397页。

诺斯罗普·格鲁曼公司任务扩展飞行器 (MEV) RPO 成像仪在 GEO 上的性能 Matt Pyrak 诺斯罗普·格鲁曼太空系统公司 约瑟夫·安德森太空公司
诺斯罗普·格鲁曼公司任务扩展飞行器 (MEV) RPO 成像仪在 GEO 上的性能 Matt Pyrak 诺斯罗普·格鲁曼空间系统 约瑟夫·安德森 空间物流有限责任公司 摘要 本文将描述和说明由诺斯罗普·格鲁曼公司制造的空间物流有限责任公司任务扩展飞行器 (MEV) 使用的会合和近距操作 (RPO) 传感器的实际性能。MEV-1 于 2019 年发射,并于 2020 年 2 月与位于 GEO 墓地轨道上距离 GEO 约 300 公里的 Intelsat 901 卫星执行会合、近距操作和对接 (RPOD)。MEV-2 于 2020 年发射,并于 2021 年 2 月和 3 月与直接在地球静止轨道上的 Intelsat 10-02 卫星执行了类似的 RPOD 序列。这些飞行器使用三种不同的传感现象来提供所有必要的相对导航数据,以实现上述 RPOD 功能。这些包括可见光谱成像仪(窄视场和宽视场)、长波红外 (LWIR) 成像仪(窄视场和宽视场)和主动扫描激光雷达。本文将探讨这些传感器在 GEO 实际任务中的性能及其对未来空间态势感知能力的潜在影响。1. 简介 Space Logistics LLC 任务延长飞行器 (MEV) 是其主承包商 Northrop Grumman Space Systems (NG) 和 NG 的几家传统公司十多年开发工作的成果。MEV 被认为是新卫星服务市场中的第一代能力,它为未设计为需要维修的航天器提供宝贵的寿命延长服务。MEV 基于 Northrop Grumman 的传统 GEOStar 航天器平台构建,并采用了两项关键技术发展。第一个是准通用对接系统,它与目前在轨的大多数最初未设计为对接的 GEO 航天器兼容。第二,是整合了强大而灵活的 RPO 传感器套件,该套件由尖端硬件和软件组成,这些硬件和软件基于诺斯罗普·格鲁曼的传统 RPO 系统,包括 Cygnus 空间站补给飞行器。MEV 可延长未为在轨加油而建造的卫星的寿命。为了执行任务,MEV 与客户飞行器进行半自动会合,并使用大约 80% 的 GEO 卫星上存在的两个功能与其对接,这两个功能是面向天顶的液体远地点发动机 (LAE) 喷嘴和周围的发射适配器环。对接后,客户飞行器的推进系统和姿态控制完全禁用,从而使 MEV 能够全权负责客户飞行器的指向和轨道管理。虽然 MEV 对接系统无疑是艺术巧思的杰作,但本文将仅探讨 MEV RPO 传感器套件的性能,一组抗辐射尖端传感器,为 MEV 相对导航算法提供原始数据。这些包括可见光谱摄像机组、长波红外 (LWIR) 摄像机组和扫描激光雷达。RPO 传感器套件允许 MEV 从 50+km 处跟踪客户车辆,并在精确对接事件期间保持厘米级的相对位置。根据客户要求,MEV 和下一代车辆可以使用其传感能力从近距离对客户车辆进行多光谱检查,并通过激光雷达收集高密度 3D 检查扫描。但对这种能力最直观的展示来自 MEV-1 对接后发布的首批从 GEO 上方拍摄的在 GEO 带中处于活跃运行状态的航天器商业图像。

为所有人提供地球智能
高效、有效且适合开展 GEO 工作计划及产品和服务的运营模式; 转型后的、资源充足的 GEO 工作计划,始终关注用户; 加强土著人民和当地社区对 GEO 治理的参与; 增加成员对 GEO 治理以及 GEO 信托基金和工作计划活动的参与; 成功吸引地球观测价值链上的各行各业的参与,包括中小企业; 国际组织和多边环境协定对 GEO 的认可和信任度提高
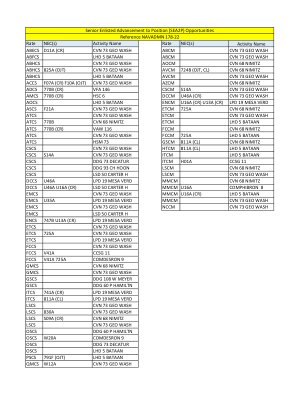
2022 年 8 月 CSG SEA2P 候选人职位.xlsx.xlsb - MyNavyHR
费率 NEC 活动名称 费率 NEC 活动名称 ABECS D11A (CR) CVN 73 GEO WASH ABCM CVN 73 GEO WASH ABFCS LHD 5 BATAAN ABCM CVN 73 GEO WASH ABHCS CVN 73 GEO WASH AOCM CVN 68 NIMITZ ABHCS 825A (OJT) CVN 73 GEO WASH AVCM 724B (OJT, CL) CVN 68 NIMITZ ABHCS LHD 5 BATAAN AVCM CVN 73 GEO WASH ACCS F07A (CR) F10A (OJT) CVN 73 GEO WASH AZCM CVN 68 NIMITZ ADCS 770B (CR) VFA 146 CSCM S14A CVN 73 GEO WASH AMCS 770B (CR) HSC 6 DCCM U46A (CR) CVN 73 GEO WASH AOCS LHD 5 巴丹 ENCM U16A (CR) U13A (CR) LPD 19 MESA VERD ASCS F21A CVN 73 GEO WASH ETCM 725A CVN 68 尼米兹 ATCS CVN 73 GEO WASH ETCM CVN 73 GEO WASH ATCS 770B CVN 68 尼米兹 ETCM LHD 5 巴丹 ATCS 770B (CR) VAW 116 FCCM CVN 68 尼米兹 ATCS CVN 73 GEO WASH FCCM 725A LHD 5 巴丹 ATCS HSM 73 GSCM 811A (CL) CVN 68尼米兹 CSCS CVN 73 GEO WASH HTCM 811A (CL) LHD 5 巴丹 CSCS S14A CVN 73 GEO WASH ITCM LHD 5 巴丹 CSCS DDG 73 迪卡特 ITCM H01A CCSG 11 CSCS DDG 93 CH HOON LSCM CVN 68 尼米兹 CSCS LSD 50 卡特 H LSCM CVN 73 GEO WASH DCCS U46A LPD 19 梅萨 VERD MMCM CVN 68 尼米兹 DCCS U46A U16A (CR) LSD 50 卡特 H MMCM U16A COMPHIBRON 8 EMCS CVN 73 GEO WASH MMCM U16A (CR) LHD 5 巴丹 EMCS U35A LPD 19 梅萨 VERD MMCM CVN 73 GEO WASH EMCS CVN 73 GEO WASH NCCM CVN 73 GEO WASH EMCS LSD 50 CARTER H ENCS 747B U13A(CR) LPD 19 MESA VERD ETCS CVN 73 GEO WASH ETCS 725A CVN 73 GEO WASH ETCS LPD 19 MESA VERD FCCS CVN 73 GEO WASH FCCS V41A CCSG 11 FCCS V41A 725A COMDESRON 9 GMCS CVN 68 NIMITZ GMCS CVN 73 GEO WASH GSCS DDG 108 W MEYER GSCS DDG 60 P HAMILTN ITCS 741A(CR) LPD 19 MESA VERD ITCS 811A(CL) LPD 19梅萨 VERD LSCS CVN 73 GEO WASH LSCS 830A CVN 73 GEO WASH LSCS S09A (CR) CVN 68 NIMITZ LSCS CVN 73 GEO WASH OSCS DDG 60 P HAMILTN OSCS W20A COMDESRON 9 OSCS DDG 73 DECATUR OSCS LHD 5 巴丹 PSCS 791F (OJT) LHD 5 巴丹 QMCS W12A CVN 73 GEO WASH