XiaoMi-AI文件搜索系统
World File Search SystemIMU

GPS-IMU传感器融合用于可靠的自动驾驶位置估计
摘要 - 全球覆盖范围和全球覆盖范围的准确定位,使其成为具有无障碍天空视图的开放区域的可靠选择。但是,在室内空间和城市峡谷中可能发生信号降解。相比之下,惯性测量单元(IMU)由陀螺仪和加速度计组成,这些计量机提供了相对运动信息,例如加速度和旋转变化。与GPS不同,IMU不依赖外部信号,使其在受GPS有限的环境中有用。尽管如此,由于误差的积累,IMU在整合加速度以确定速度和位置的同时会流动。因此,融合GPS和IMU对于增强自动驾驶汽车中导航系统的可靠性和精度至关重要,尤其是在GPS信号受到损害的环境中。为了确保平稳导航并克服每个传感器的局限性,提出的方法将融合GPS和IMU数据。此传感器融合使用无知的卡尔曼过滤器(UKF)贝叶斯过滤技术。拟议的导航系统旨在坚固,为自动驾驶汽车的安全操作(尤其是在GPS被拒绝的环境中的安全操作)至关重要的连续和准确的定位。该项目使用Kitti GNSS和IMU数据集进行实验验证,表明GNSS-IMU融合技术可减少仅GNSS的RMSE。RMSE分别从13.214、13.284和13.363降至4.271、5.275和0.224,分别为X轴,Y轴和Z轴。使用UKF的实验结果显示了使用GPS和IMU传感器融合改善自动驾驶汽车导航的有希望的方向,并使用GPS有限环境中的两个传感器中的最佳融合。索引术语 - 自主车位,全球定位系统,惯性测量单元,传感器融合,无知的卡尔曼滤波器

产品描述 Leica IPAS20
提供机载传感器数据的直接地理参考 Leica IPAS20 通过严格的卡尔曼滤波器将精确的 GNSS 解决方案与原始 IMU 测量相结合。Leica IPAS20 提供的 IMU 基于光纤、环形激光或干调陀螺仪技术。每种 IMU 类型都以高数据速率(从 200Hz 到 500Hz)测量精确的速度增量和角度增量。Leica IPAS20 将 IMU 测量的出色短期精度与 GPS 解决方案的长期稳定性相结合,在整个任务期间产生高度精确的位置、速度和方向。卡尔曼滤波器将同时估计来自加速度计和陀螺仪的误差。Leica IPAS20 还可以估计 GNSS 天线和传感器参考中心之间的杠杆臂。估计的实时解决方案(包括位置、速度和滚动、俯仰和航向)可用于飞行管理,也可用于控制其他传感器。滚动、俯仰和航向可以作为稳定支架(如 Leica PAV30)的数字信号输出,以提高支架的精度。或者,它们可以作为模拟信号输出以控制其他传感器功能,例如 Leica ALS50 激光扫描仪的滚动补偿。灵活且可扩展的机载系统 Leica IPAS20 系统由 Leica IPAS20 控制单元和集成的 GNSS 接收板、GNSS 天线、IMU 和软件组成。该系统专为所有类型的机载传感器而设计:

一种新型的Lidar-Gnss-Ins两相紧密耦合的集成方案,用于精确导航
摘要在精确导航方面的最新进展已广泛利用全球导航卫星系统(GNSS)和惯性导航系统(INS)的集成,尤其是在智能车辆的领域。然而,这种导航系统的功效被非光(NLOS)信号的反射和多径中断所损害。基于积极的感知传感器以其精确的3D测量而闻名的基于主动感知的传感器的光检测和范围(LIDAR)的探测器在增强导航系统方面已经变得越来越普遍。尽管如此,与GNSS/INS系统的激光雷达进气量同化列出了重大挑战。应对这些挑战,这项研究引入了两相传感器融合(TPSF)方法,该方法通过双阶段传感器融合过程协同结合了GNSS定位,激光镜和IMU预融合。初始阶段采用扩展的Kalman滤波器(EKF)与IMU机械化合并GNSS解决方案,从而促进了IMU偏见和系统初始化的估计。随后,第二阶段将扫描到映射激光雷达的进程与IMU机械化相结合,以支持连续的LiDAR因子估计。然后将因子图优化(FGO)用于liDar因子,IMU预融合和GNSS解决方案的全面融合。通过对城市化开源数据集的苛刻轨迹进行严格的测试来证实所提出的方法的功效,与最先进的算法相比,该系统表明性能的增强,可实现1.269米的翻译标准偏差(STD)。

当视频遇到惯性传感器:使用惯性传感器进行手指运动分析的零样本域自适应
无处不在的手指运动追踪使增强现实、体育分析、康复医疗保健等领域的许多激动人心的应用成为可能。虽然使用摄像头的手指运动追踪非常成熟,这很大程度上归功于大量训练数据集的可用性,但是对于为带有惯性测量单元 (IMU) 传感器的可穿戴物联网设备开发强大的机器学习 (ML) 模型来说,训练数据却十分匮乏。为了解决这个问题,本文提出了 ZeroNet,这是一个展示以零训练开销为 IMU 传感器开发 ML 模型的可行性的系统。ZeroNet 从公开的视频中收集训练数据以对 IMU 进行推理。由于传感器-摄像头坐标系、用户身体大小、手势过程中的速度/方向变化、传感器位置变化等差异,视频和 IMU 域之间的数据差异带来了许多挑战。ZeroNet 通过系统地从视频中提取运动数据并将其转换为 IMU 传感器测量的加速度和方向信息来解决这些挑战。此外,还利用数据增强技术在收集的训练数据中创建合成变化,以增强 ML 模型对用户多样性的通用性和鲁棒性。对 10 位用户的评估表明,对于 50 个手指手势的识别,top-1 准确率为 82.4%,top-3 准确率为 94.8%,这表明前景光明。虽然我们只是触及了表面,但我们概述了许多有趣的可能性,可以将这项工作扩展到计算机视觉、机器学习和可穿戴物联网等跨学科领域,从而实现手指运动跟踪的新应用。

基于实时传感器的虚拟现实运动捕捉系统
最先进的动作捕捉系统有一个缺点:它们很昂贵。用于电影的系统需要多个高端摄像机,以及演员要穿的特殊服装。在后面的章节中,将详细解释存在哪些不同类型的动作捕捉系统、它们有何不同、它们的优点和缺点以及它们用于不同应用的原因。这项工作的主要动机是研究一种替代的动作捕捉方法,这种方法更具成本效益,因此更容易被更广泛的人群接受 [2]。该技术基于 IMU,即惯性测量单元,它基本上是可以测量物体方向的小型传感器。如今,大多数人每天都在使用 IMU,甚至他们自己都不知道。大多数现代智能手机或平板电脑都包含 IMU,它可以确定设备的旋转。这使我们能够通过将设备倾斜到某个方向来控制游戏中的角色(例如 Temple Run)。成为大众产品使得能够测量六个甚至九个自由度的微型芯片变得便宜。现在我们可以将这项技术用于我们自己的目的。例如,许多建造者使用它们来调平自己的四轴飞行器。这些 IMU 传输到人类身上后,可以捕捉单个肢体的旋转并将其发送到计算机,以旋转虚拟演员的同一肢体 [3]。当将惯性测量单元 (IMU) 与运行导航方程的算法相结合时,人们就会谈论惯性导航系统 (INS)。
基于实时传感器的虚拟运动捕捉系统...
最先进的动作捕捉系统有一个缺点:它们很昂贵。用于电影的系统需要多个高端摄像机,以及演员要穿的特殊服装。在后面的章节中,将详细解释存在哪些不同类型的动作捕捉系统、它们有何不同、它们的优点和缺点以及它们用于不同应用的原因。这项工作的主要动机是研究一种替代的动作捕捉方法,这种方法更具成本效益,因此更容易被更广泛的人群接受 [2]。该技术基于 IMU,即惯性测量单元,它基本上是可以测量物体方向的小型传感器。如今,大多数人每天都在不知不觉中使用 IMU。大多数现代智能手机或平板电脑都包含 IMU,用于确定设备的旋转。这使我们能够通过将设备倾斜到某个方向来控制游戏中的角色(例如Temple Run)。成为大众产品使得能够测量六个甚至九个自由度的微型芯片变得便宜。我们现在可以将这项技术用于自己的目的。例如,许多制造商使用它们来调平自己的四轴飞行器。转移到人类身上后,这些 IMU 可以捕捉单个肢体的旋转并将其发送到计算机以旋转虚拟演员的同一肢体 [3]。当将惯性测量单元 (IMU) 与运行导航方程的算法相结合时,人们就会谈论惯性导航系统 (INS)。
战术系列扩展能力手册
将外部 IMU 或 SAASM/M-Code GPS 接收器连接到 VectorNav 传感器的辅助端口,使用户能够保留现有驱动程序并连接到传感器的主端口。可以使用 VectorNav 的控制中心 GUI 对 VectorNav 传感器进行简单配置以接受外部 IMU 或 GPS 接收器。这使用户能够无缝提高其惯性解决方案的运行性能和功能。有关电缆购买的信息,请联系 VectorNav 支持 (support@vectornav.com)。
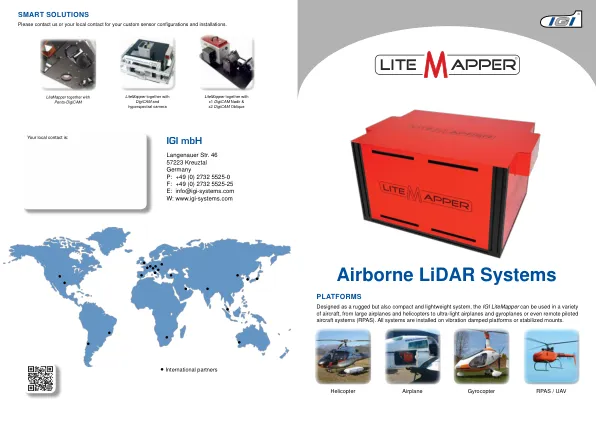
机载 LiDAR 系统
所有航空 LiDAR 系统的核心都是用于直接地理参考的精确定位系统 AEROcontrol。使用不同的免出口 IMU,AEROcontrol 可以精确测量传感器或传感器星座的位置和飞行姿态,频率高达 600 Hz。该系统为所有集成传感器提供一个操作员界面。与 AEROoffice 结合使用,可提供简化的数据工作流程和内置杠杆臂校正,以提高所有航空测绘应用的生产率。特点:• 一个紧凑的系统,多种应用(为机载、陆地、水面和铁路应用实施特殊的前向/后向卡尔曼滤波算法)• 544 通道 GPS、GLONASS、BEIDOU、GALILEO、IRNSS、QZSS 支持,支持 TERRASTAR • 基于测量级 FOG 和 MEMS 的 IMU,全部免出口 • IGI 精确调平 - 基于 IMU 的精确稳定支架控制

当视频遇到惯性传感器:使用惯性传感器进行手指运动分析的零样本域自适应
无处不在的手指运动追踪使增强现实、体育分析、康复医疗保健等领域的许多激动人心的应用成为可能。虽然使用摄像头的手指运动追踪非常成熟,这很大程度上归功于大量训练数据集的可用性,但是对于为带有惯性测量单元 (IMU) 传感器的可穿戴物联网设备开发强大的机器学习 (ML) 模型来说,训练数据却十分匮乏。为了解决这个问题,本文提出了 ZeroNet,这是一个展示以零训练开销为 IMU 传感器开发 ML 模型的可行性的系统。ZeroNet 从公开的视频中收集训练数据以对 IMU 进行推理。由于传感器-摄像头坐标系、用户身体大小、手势过程中的速度/方向变化、传感器位置变化等差异,视频和 IMU 域之间的数据差异带来了许多挑战。ZeroNet 通过系统地从视频中提取运动数据并将其转换为 IMU 传感器测量的加速度和方向信息来解决这些挑战。此外,还利用数据增强技术在收集的训练数据中创建合成变化,以增强 ML 模型对用户多样性的通用性和鲁棒性。对 10 位用户的评估表明,对于 50 个手指手势的识别,top-1 准确率为 82.4%,top-3 准确率为 94.8%,这表明前景光明。虽然我们只是触及了表面,但我们概述了许多有趣的可能性,可以将这项工作扩展到计算机视觉、机器学习和可穿戴物联网等跨学科领域,从而实现手指运动跟踪的新应用。