XiaoMi-AI文件搜索系统
World File Search SystemImager
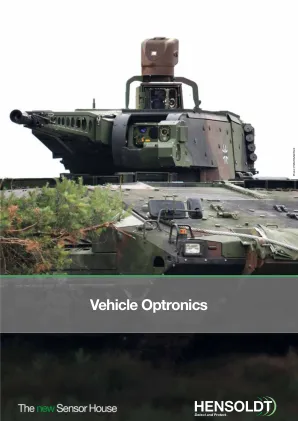
车辆光电 - Hensoldt
陀螺仪稳定系统如果没有稳定的潜望镜,主战坦克和装甲车辆在行驶过程中将很难发现目标。我们的高级版本使乘员组能够快速判断车辆周围环境并在移动中检测和攻击目标。它们采用基于陀螺仪的稳定机制,可以补偿运动和振动,从而在铺砌道路上甚至崎岖地形上以各种速度保持图像稳定。集成的热像仪可在白天、夜晚和恶劣天气条件下提供清晰的观察能力。机载激光器和连接的指挥和控制信息系统。
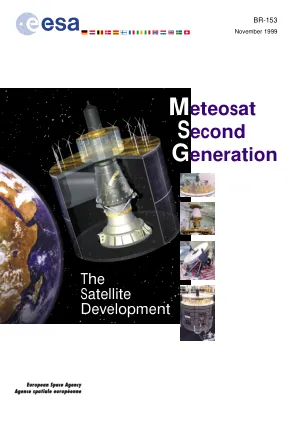
第二代气象卫星 - ESA 地球在线
目的 – 每 15 分钟在 12 个光谱带(2 个可见光、1 个高分辨率可见光、7 个红外、2 个水蒸气)上拍摄一张地球及其大气层的图像 – 将图像数据和其他气象信息传播给数据用户站 技术特点 – 自旋稳定航天器 – 质量(发射时)约 2 吨 – 直径 3.2 米 – 高度 3.7 米 – 寿命 7 年 – 轨道地球静止 – 轨道位置在赤道平面和 0˚ 经度以上 – 运载火箭与阿丽亚娜-4 和阿丽亚娜-5 兼容 – 发射日期 2000 年 10 月(MSG-1) – 有效载荷 • 旋转增强可见红外成像仪 (SEVIRI) • 地球静止地球辐射预算 (GERB) 仪器 • 搜索和救援 (S & R) 应答器 • 任务通信包 (MCP)


遥感光谱成像 - 华盛顿
■ 用于遥感陆地特征和物体的光谱成像是高空间分辨率、大孔径卫星成像系统的替代方案。光谱成像的早期应用面向地面覆盖分类、矿物勘探和农业评估,采用少量精心选择的光谱带,分布在电磁波谱的可见光和红外区域。这些早期多光谱成像传感器的改进版本至今仍在使用。一种新型传感器——高光谱成像仪也已出现,它采用数百个连续的波段来检测和识别各种天然和人造材料。这篇概述文章介绍了光谱成像的基本要素,并讨论了传感器以及目标检测和分类应用的历史演变。O
遥感光谱成像 - 华盛顿
■ 用于遥感陆地特征和物体的光谱成像是高空间分辨率、大孔径卫星成像系统的替代方案。光谱成像的早期应用面向地面覆盖分类、矿物勘探和农业评估,采用少量精心选择的光谱带,分布在电磁波谱的可见光和红外区域。这些早期多光谱成像传感器的改进版本至今仍在使用。一种新型传感器——高光谱成像仪也已出现,它采用数百个连续的波段来检测和识别各种天然和人造材料。这篇概述文章介绍了光谱成像的基本要素,并讨论了传感器以及目标检测和分类应用的历史演变。O

用于映射UMNGENI集水区LULC的机器学习算法,夸祖鲁 - 纳塔尔省
摘要:集水区的土地使用/土地覆盖(LULC)的分析是保护淡水资源的第一个措施。流域中的LULC信息已在自然科学领域中广受欢迎,因为它可以帮助水资源管理者和环境卫生专家根据可用的定量内形式制定自然保护策略。因此,遥感是解决集水层面与环境相关问题的问题。In this study, the performance of four machine learning algorithms (MLAs), such as Random Forests (RF), Support Vector Machine (SVM), Artificial Neural Networks (ANN), and Naïve Bayes (NB) was investigated to classify the catchment into nine rele-vant classes of the undulating watershed landscape using Landsat 8 Operational Land Imager (L8-OLI) imagery.对MLA的评估是基于对分析师的目光检查和常用的评估指标,例如用户的准确性(UA),生产者的准确性(PA),整体准确性(OA)和KAPPA系数。MLA产生了良好的结果,其中RF(OA = 97.02%,Kappa = 0.96),SVM(OA = 89.74%,Kappa = 0.88),Ann(OA = 87%,Kappa = 0.86)和NB(OA = 68.64 kappa = 68.64 kappa = 0.58)。结果表明,RF模型在SVM和ANN上具有较小的边缘的外观性能。NB产生令人满意的结果,这可能主要受到其对有限训练样本的敏感性的影响。相比之下,RF的稳健型号可能是由于能够用有限的火车数据对高维数据进行分类的能力。关键字:翁根尼河流域;机器学习; lulc; Landsat 8;遥感

塞斯纳 CITATION 的激光扫描建模
摘要 在航空航天工程中,计算流体动力学 (CFD) 领域研究飞机的空气动力学行为。目前用于执行 CFD 模拟的是飞机的计算机辅助设计 (CAD) 模型,这些模型通常是低细节的工业设计模型。研究改进模拟过程结果的新方法非常重要。可以在此方向上测试的一种方法是创建用于 CFD 的实际飞机的更详细模型。这种模型可以通过逆向工程技术构建。在众多可用方法中,激光扫描最适合这样的项目。这是因为激光扫描具有在短时间内以高精度获取大量物体点的优势。代尔夫特理工大学拥有开展此类项目的必要资源。对代尔夫特理工大学航空航天工程学院的一架用于教学和科学目的的 Cessna Citation II 进行了测量。还提供这架飞机的 CAD 设计模型。此外,代尔夫特理工大学的光学和激光遥感系还提供了一台 Z+F Imager 5003 激光扫描仪。这是一款相位扫描仪,每秒可以轻松捕获 120,000 个 X、Y 和 Z 坐标点。测量在一天之内在 Schiphol East 的机库中进行,Cessna 就位于那里。所选的测量设置使用了 12 个扫描位置,这些位置“su

光电系统 - Leonardo - 电子产品
EOST381M 基于模块化有效载荷,最多可容纳六个 EO 传感器。它是一个单 LRU 和 ITAR 免费系统,使用专有的 ERICA_Plus 热像仪,工作在中波长光谱 (3-5μm) 中,基于公司的焦平面阵列 (FPA) Hawk(标准清晰度)或 Falcon(高清)探测器。对于瞄准操作,EOST381M 使用激光指示器(符合 STANAG3733)进行炸弹/导弹精确激光制导。对于距离测量,如果需要,可以安装激光测距仪,并且还可以使用 NVG 兼容激光指示器与全高清 TVC SPOTTER 配合使用,以提供增强的微光目标标记能力。如果需要,可以选择使用 SWIR 摄像机来提供可见点激光以进行视觉目标确认。
爱普生 PowerLite® S1
产品/配件零件编号 EPSON PowerLite S1 投影仪 V11H128020 替换灯泡 V13H010L25 空气过滤器套件(5 片) V13H134A03 投影仪遥控器 V12H007T09 演示遥控器 V12H007T11 吊顶支架 ELPMB42 悬挂适配器 ELPMBAPL 假天花板板 ELPMBFCP 分配放大器 ELPDA01 分量视频电缆 ELPKC19 S-Video 电缆 ELPSV01 Mac 适配器套件 ELPAP01 Samsonite 带轮软包 ELPKS35 Samsonite 投影仪和笔记本电脑软肩包 ELPKS43 ATA 模制硬壳包 ELPKS49 50 英寸便携式屏幕 ELPSC06 60 英寸便携式弹出式屏幕 ELPSC07 80 英寸便携式弹出式屏幕 ELPSC08 高分辨率文档成像仪 ELPDC02 高分辨率文档相机V12H064020 Kensington 安全锁 ELPSL01
OPTRONICS SYSTEMS - Leonardo - 电子产品
EOST381M 基于模块化有效载荷,最多可容纳六个 EO 传感器。它是一个单 LRU 和 ITAR 免费系统,使用专有的 ERICA_Plus 热像仪,在中波长光谱(3-5μm)内运行,基于公司的焦平面阵列 (FPA) Hawk(标准清晰度)或 Falcon(高清)探测器。对于瞄准操作,EOST381M 使用激光指示器(符合 STANAG3733)进行炸弹/导弹精确激光制导。对于距离测量,如果需要,可以安装激光测距仪,并且还可以与全高清 TVC SPOTTER 配合使用 NVG 兼容激光指示器,以提供增强的低光目标标记能力。如果需要,可以选择 SWIR 摄像机来提供可见点激光以进行视觉目标确认。