XiaoMi-AI文件搜索系统
World File Search SystemLTER

使用实时自动识别系统 (AIS) 数据进行扩展卡尔曼滤波器设计和船舶运动预测
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据由全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收编码的 ASCII 字符信号。因此,必须使用解析器解码 AIS 语句以获取实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要功能。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明了估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引词——卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面舰艇、船舶
视觉集成导航系统,用于在 GNSS/SBAS 或 ILS 发生故障时进行飞机最后进近
本文提出了一种视觉集成导航系统,用于引导飞机在最终下滑道上滑行。该系统利用机载视觉系统跟踪跑道特征并估计飞机相对于着陆跑道的 6D 姿态。如果 ILS 或 GNSS/SBAS 传感器性能下降或出现故障,所提出的视觉集成导航系统将允许飞机继续执行最终进近程序,并保持导航精度。为了处理由于图像处理时间而导致的此类基于视觉的测量不可忽略的延迟,建立了一个包含时间延迟测量的误差状态卡尔曼滤波器 (ESKF) 框架。所提出的延迟测量 ESKF 框架利用了这样一个事实:摄像机图像采集由系统触发,因此可以无延迟地通知。这使得导航滤波器能够及时向前执行估计状态的反向传播,以便在测量可用时为未来的校正步骤做好准备。基于此框架的视觉集成导航系统已开发出来,并在模拟中验证了其功能。其估计性能将通过固定翼无人机实验平台上的两种不同视觉系统进行飞行评估。

无人机集成视觉系统...
摘要 — 无人机的视觉对于无人机相关应用(例如搜索和救援、在移动平台上着陆等)非常重要。在本工作中,我们开发了无人机在移动平台上着陆以及复杂环境中无人机物体检测和跟踪的集成系统。首先,我们提出了一种基于 LoG 的鲁棒深度神经网络进行物体检测和跟踪,与典型的基于深度网络的方法相比,它在对物体尺度和光照的鲁棒性方面具有很大的优势。然后,我们还在原有的卡尔曼滤波器的基础上进行了改进,并设计了一个基于迭代多模型的滤波器来解决运动估计实际情况下未知动态的问题。接下来,我们实现了整个系统,并在两种复杂情况下进行了基于 ROS Gazebo 的测试,以验证我们设计的有效性。最后,我们将提出的检测、跟踪和运动估计策略部署到实际应用中,以实现无人机对支柱的跟踪和避障。事实证明,我们的系统在实际应用中表现出很高的准确性和稳健性。

Ads-B航空目标信道优化研究...
为了提高航空目标监视雷达的监视效果,本文对传统滤波算法进行了改进,并基于改进滤波算法构建了ADS-B航空目标监视雷达通道优化系统。此外,本文通过算法改进保证状态协方差的正定或半正定性,采用均方根体积卡尔曼滤波器避免矩阵非正定性导致的滤波器发散或跟踪中断;交互式多模型的滤波原理是采用多个滤波器并行处理,通过调整调整算法中的一步预测协方差来实现自适应调整算法残差。此外,本文结合实际需求,构建了ADS-B航空目标监视雷达通道优化的系统功能结构,并采用软件工程的方法进行需求建模和分析。最后,本文设计实验对系统性能进行验证。研究结果表明,本文构建的系统性能满足实际需求。

基于多目标优化的 SSVEP 脑机接口高通空间滤波
摘要 — 为了提高基于稳态视觉诱发电位 (SSVEP) 的脑机接口 (BCI) 的目标识别性能,已经提出了许多空间滤波方法。现有的方法倾向于仅使用来自同一刺激的训练数据来学习某个目标的空间滤波器参数,并且它们很少考虑来自其他刺激的信息或训练过程中的体积传导问题。在本文中,我们提出了一种新的基于多目标优化的高通空间滤波方法来提高 SSVEP 检测的准确性和鲁棒性。滤波器是通过最大化训练信号和来自同一目标的单个模板之间的相关性,同时最小化来自其他目标的信号与模板之间的相关性来得出的。优化还将受到滤波器元素之和为零的约束。在两组自采集的 SSVEP 数据集(分别包含 12 个和 4 个频率)上的评估研究表明,所提方法优于 CCA、MsetCCA、SSCOR 和 TRCA 等比较方法。所提方法还在 35 名受试者记录的公开 40 类 SSVEP 基准数据集上进行了验证。实验结果证明了所提方法对提升 SSVEP 检测性能的有效性。

评估两个不同大小的数据集上的双层特征选择的运动想象分类性能
摘要:已经进行了大量研究来从各个方面提高基于运动想象的脑机接口 (BCI) 分类性能。然而,在客观和主观数据集上比较他们提出的特征选择框架性能的研究有限。因此,本研究旨在提供一种新颖的框架,该框架将不同频带的空间滤波器与双层特征选择相结合,并在已发布和自获取的数据集上对其进行评估。对脑电图 (EEG) 数据进行预处理并将其分解为多个频率子带,然后根据 Fisher 比率和最小冗余最大相关性 (mRmR) 算法提取、计算和排序其特征。通过线性判别分析 (LDA) 选择信息滤波器组进行最佳分类。研究结果首先表明,所提出的方法在准确性和 F1 分数方面可与其他传统方法相媲美。研究还发现,手与脚的分类比左手与右手的分类更具可辨性(差异为 4-10%)。最后,在应用于小规模数据时,滤波器组通用空间模式(FBCSP,无特征选择)算法的性能明显低于所提出的方法(p = 0.0029、p = 0.0015 和 p = 0.0008)。
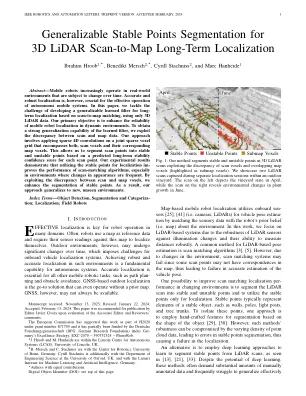
3D激光雷达扫描到地图长期定位的可推广稳定点细分
摘要 - 动物机器人越来越多地在实际会随着时间而变化的现实环境中运行。准确且健壮的本地化对于自动移动系统的有效运行至关重要。在本文中,我们仅使用3D LIDAR数据来应对基于扫描到地图匹配的长期本地化开发可推广的学习过滤器的挑战。我们的主要目标是提高动态环境中移动机器人本地化的可靠性。为了获得学习过滤器的强大概括能力,我们利用扫描和MAP数据之间的差异。我们的方法涉及将稀疏的4D卷积应用于包含扫描素及其相应地图体素的关节稀疏体素电网上。这使我们可以根据每个扫描点的长期稳定置信分数将扫描点分为稳定且不稳定的点。我们的实验结果表明,利用稳定点进行定位 - 证明了扫描匹配算法的性能,尤其是在外观变化频繁的环境中。通过利用扫描和地图体素之间的差异,我们增强了稳定点的分割。因此,我们的方法概括为新的,看不见的环境。

David BombaraDavid Bombara
·进行了有关低地球轨道(LEO)资格和测试的文献,包括原位评估任务和模拟LEO环境。·开发了一种用于使用线性可变滤波器和红外摄像机对相位更改可调节滤波器进行自动实时表征的系统,用于广泛的中波红外红外成像·技能:MATLAB,C/C ++,C/C ++,电路,电路的拟合,科学撰写。·参考:Hyun Jung Kim,博士,hyunjung.kim@nasa.gov
高维神经解码的非线性最大相关信息过滤器
摘要:神经信号解码是脑机界面(BMI)中的一项关键技术,可以解释从瘫痪患者中收集的多神经活动的运动意图。作为一种常用的解码算法,卡尔曼过滤器通常用于从高维神经帧观察中得出运动状态。但是,其性能是有限的,对于具有高维测量的嘈杂的非线性神经系统的有效性较小。在本文中,我们提出了一个非线性最大值相关信息过滤器,目的是在过滤过程中进行更好的状态估计,以实现嘈杂的高维测量系统。我们使用神经网络重建了高维测量和低维状态之间的测量模型,并使用Correntropy标准来得出状态估计,以应对非高斯噪声并消除较大的初始不确定性。此外,还提供了收敛性和鲁棒性的分析。通过将其应用于来自两只大鼠的神经尖峰数据的多个段来评估所提出的算法的有效性,以解释受试者执行两杠杆歧视任务时的运动状态。与其他滤波器相比,我们的结果表现出更好,更健壮的状态估计性能。