XiaoMi-AI文件搜索系统
World File Search SystemLVDT
航空航天 LVDT 位置传感器
其他产品信息 本数据表中包含的有关产品应用的信息仅供客户参考。Active Sensors 不对产品是否适合任何特定设计应用、环境或其他情况提供任何保证或陈述,除非随后在产品销售和购买合同中达成一致。此外,Active Sensors 不对其产品在关键控制应用中的保证或担保,这些应用通常是生命支持系统和航空和核工业,产品故障可能导致受伤、生命损失或灾难性的财产损失。因此,客户应自行确定实际性能要求,随后确定产品是否适合任何特定设计应用和产品使用环境。© Active Sensors
交流和直流供电 LVDT 位置传感器
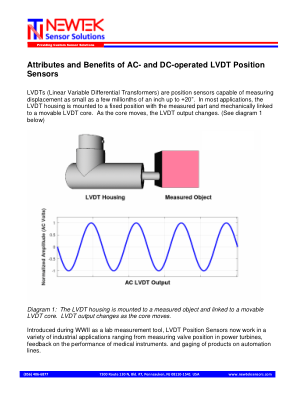
微处理器和新型建筑材料的发展显著优化了 LVDT 的性能、范围和拥有成本,使其成为优于其他位移技术的技术选择。如今,LVDT 传感器提供高温版本、扩展范围、更小的行程、抗辐射和其他特性,以满足更广泛行业的要求。它们甚至作为遥测系统的一部分,用于测量参数并向远程监控系统提供反馈,远程监控系统将信息存储在云中,供操作员访问或进一步处理。交流和直流版本 LVDT 有交流和直流版本。最初,LVDT 是交流操作的,不包含任何内部电子设备。因为它是一个变压器,所以 LVDT 基本上是一个交流输入/交流输出设备。它需要在初级绕组上施加交流激励电压,并在次级绕组上产生交流输出。外部信号调节器提供激励信号并测量输出。它解调低幅度交流输出并产生直流电压、电流或数字输出,供仪表、PLC 和其他控制系统使用。 (见图2)

LVDT 信号调节技术 I 简介 ...
LVDT(线性可变差动变压器)是一种机电设备,其产生的电输出与单独的可移动磁芯的位移成比例。它由三个线圈组成,其中一个是变压器的初级线圈。另外两个线圈通常关于初级线圈对称,在正常运行时以相反方向串联连接以形成变压器次级线圈。当可移动变压器磁芯相对于两个次级绕组居中时,它们将具有相同幅度的感应输出电压,但极性或相位将相反。因此,次级线圈的净输出电压将为零。这个位置通常称为电气零位。当磁芯从零位移位时,一个次级线圈的输出会增加,而另一个线圈的输出会减少,从而产生与磁芯位移相关的非零差动输出电压。当磁芯从零位的一侧移动到另一侧时,该输出电压的相位会改变 180°。
AD598 LVDT 信号调节器 - ADI 公司
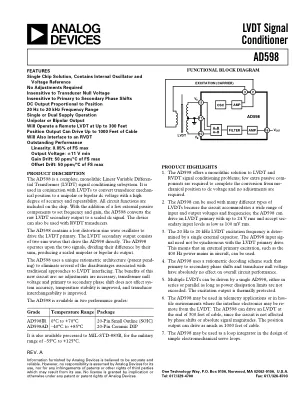
注释 1 V A 和 V B 表示检测到的正弦波的平均偏差 (MAD)。注意,为了使此传递函数线性表示正位移,LVDT 的 V A 和 V B 之和必须与行程长度保持不变。请参见“工作原理”。另请参见图 7 和图 12 中的 R2。 2 从 T MIN 到 T MAX ,仅由 AD598 引起的总误差由增益误差、增益漂移和失调漂移相结合决定。例如,AD598AD 从 T MIN 到 T MAX 的最坏情况总误差计算如下:总误差 = +25 ° C 时的增益误差(± 1% 满量程)+ –40 ° C 至 +25 ° C 之间的增益漂移(FS 的 50 ppm/ ° C × +65 ° C)+ –40 ° C 至 +25 ° C 之间的失调漂移(FS 的 50 ppm/ ° C × +65 ° C)= ± 1.65% 满量程。请注意,满量程的 1000 ppm 等于满量程的 0.1%。满量程定义为最大正输出和最大负输出之间的电压差。3 仅 AD598 的非线性,以满量程的 ppm 为单位。非线性定义为 AD598 输出电压与直线的最大测量偏差。直线由产生的最大满量程负电压与产生的最大满量程正电压连接而成。4 参见传递函数。5 该偏移指的是 (V A –V B )/(V A +V B ) 输入,跨越满量程范围 ± 1。[要使 (V A –V B )/(V A +V B ) 等于 +1,V B 必须等于零伏;相应地,要使 (V A –V B )/(V A +V B ) 等于
技术支持文件:商业和工业设备的能源效率计划:
1出于社论原因,在《美国法典》中进行编纂后,B和C部分分别被重新指定为A部分和A-1部分。2 EPACT 2005确定,在2007年1月1日或之后生产的低压干型分配变压器的效率应为“确定分配变压器确定能源效率的指南”中指定的分配变压器的I类效率水平,由国家电气制造商协会(Nema Electrical Wronelaperers Association)(NEMA TP 1-2002)发布。3尽管在EPCA的一部分中已经建立了与分销变压器有关的某些规定,包括LVDT分配变压器的测试程序和标准,通常适用于消费产品(请参阅42 U.S.C.6291(35),6293(b)(10),6295(y)),它们是商业设备。因此,DOE在10 CFR第431部分,包括某些商业和工业设备的10 CFR第431部分中建立了包括LVDT分配变压器在内的配电变压器的监管要求。参见,70 FR 60407(2005年10月18日)。4 2013年4月标准的技术支持文件最终规则可在以下提供:https://www.regulation.gov/document?d=eere-2010-Bt-Std-0048-0760

17194 联邦公报 / 第 60 卷,第 65 期 / 1995 年 4 月 5 日星期三 / 规则和条例
是 6 叶 Dowty Rotol 后掠形螺旋桨。单个控制杆控制每个螺旋桨/发动机组合。尾部将安装辅助动力装置 (APU)。该飞机可容纳两名飞行员、一名观察员、两名乘务员、行李架、卫生间,并可安装厨房。有一个前后储物舱和一个后货舱。飞机的最大运行高度为 31,000 英尺。萨博 2000 具有全液压电子控制方向舵,并将具有全液压电子控制升降舵作为后续设计修改。动力升降舵控制系统 (PECS) 提供左右升降舵表面的控制和动力驱动。PECS 还提供飞机稳定性增强和配平功能。拟议的升降舵系统在许多方面与方向舵设计相似,由模拟和数字电路混合组成,没有机械备份。控制柱与线性可变差动传感器 (LVDT)、操纵杆阻尼器、自动驾驶伺服器、带断开装置的线性弹簧相连,并与电子断开装置互连。与控制柱相连的位置传感器 (LVDT) 向两个电动升降控制装置 (PECU) 提供信号。每个 PECU 通过两个独立的伺服执行器通道 (SAC) 控制两个升降舵伺服执行器 (ESA)。每个 SAC 细分为一个主控制通道和一个监控通道。四个 ESA 中的两个由一个 PECU 控制,用于定位一个升降舵侧。ESA 有两种操作模式,主动和阻尼。当 PECU 的模式控制电流和液压可用时,将产生主动模式。一个主动伺服执行器足以操作升降舵表面。升降舵伺服执行器阀门和执行器柱塞位置反馈由位置传感器 (LVDT) 提供。PECU 通过配平继电器和两个数字空气数据计算机连接到一台飞行控制计算机。飞行控制计算机还向自动驾驶伺服器提供信号。操纵杆到升降舵的传动装置是指示空速 (IAS) 的功能。配平和稳定性增强基于 IAS、垂直加速度和襟翼位置。操纵杆、配平和升降舵的位置和状态信息被传送到发动机
17194 联邦公报 / 第 60 卷,第 65 期 / 1995 年 4 月 5 日星期三 / 规则和条例
是 6 叶 Dowty Rotol 后掠形螺旋桨。单个控制杆控制每个螺旋桨/发动机组合。辅助动力装置 (APU) 将被安装在尾部。飞机可容纳两名飞行员、一名观察员、两名乘务员、行李架、卫生间,并设有厨房。有一个前后储物舱和一个后货舱。飞机的最大飞行高度为 31,000 英尺。Saab 2000 具有全液压驱动的电子控制方向舵,并将具有全液压驱动的电子控制升降舵作为后续设计修改。动力升降舵控制系统 (PECS) 提供左右升降舵表面的控制和动力驱动。PECS 还提供飞机稳定性增强和配平功能。拟议的升降舵系统在许多方面与方向舵设计相似,由模拟和数字电路混合组成,没有机械备份。控制柱连接到线性可变差动传感器 (LVDT)、操纵杆阻尼器、自动驾驶伺服器、带断开装置的线性弹簧,并与电子断开装置互连。连接到控制柱的位置传感器 (LVDT) 向两个电动升降舵控制单元 (PECU) 提供信号。每个 PECU 通过两个独立的伺服执行器通道 (SAC) 控制两个升降舵伺服执行器 (ESA)。每个 SAC 细分为一个主控制通道和一个监控通道。由一个 PECU 控制的四个 ESA 中的两个定位一个升降舵侧。ESA 有两种操作模式:主动和阻尼。当 PECU 的模式控制电流和液压可用时,将产生主动模式。一个主动伺服执行器足以操作升降舵表面。升降舵伺服执行器阀门和执行器柱塞位置反馈由位置传感器 (LVDT) 提供。PECU 通过配平继电器和两台数字空气数据计算机连接到一台飞行控制计算机。飞行控制计算机还向自动驾驶伺服器提供信号。操纵杆到升降舵传动装置是指示空速 (IAS) 的功能。配平和稳定性增强基于 IAS、垂直加速度和襟翼位置。操纵杆、配平和升降舵位置和状态信息被馈送到发动机
风洞压力测量技术
1. 简介.......................................................................................................................................................................................................................................................................................................................................................................................1 2. 传感器....................................................................................................................................................................................................................................................................................................................................3 2. 1 可变电阻传感器....................................................................................................................................................................................................................................................................3 2. 1 可变电阻传感器....................................................................................................................................................................................................................................................................3 2. 1. 1 电位计压力传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.1.2.1 表压隔膜压力传感器..................................................................................................................................6 2.1.2.2 悬臂式传感器..................................................................................................................................................8 2.1.2.3 压力容器传感器..................................................................................................................................................................9 2.1.2.4 嵌入式应变计传感器..................................................................................................................................................9 9 2.1.2.5 非粘结应变计压力传感器....................................................................................................................10 2.1.2.6 10 2.2 可变磁阻压力传感器....................................................................................................................................11 2.2.1 膜片式可变磁阻传感器....................................................................................................................................11 2.2.2 波登管可变磁阻压力传感器....................................................................................................................................12 2.2.3 线性可变差动变压器 (LVDT) 型传感器... . . . . . 13 2.2.4 可变磁阻压力传感器的一般性能 . . . . . . . 13 2 . 3 可变电容压力传感器