XiaoMi-AI文件搜索系统
World File Search SystemLoris

LORIS:用于极端地形探索的轻型自由攀爬机器人
摘要 — 攀爬机器人可以调查传统探测车由于地形陡峭而无法到达的具有科学价值的地点。配备微棘爪的机器人特别适合攀爬岩石峭壁,但大多数现有设计要么体积大、速度慢,要么仅限于相对平坦的表面(如墙壁)。我们提出了一种新型自由攀爬机器人,通过创新爪设计和力控制来弥补这一差距。完全被动的爪和腕关节可实现安全抓握,同时减轻质量和复杂性。使用基于优化的控制策略在机器人的爪之间分配力,以最大限度地降低意外脱落的风险。机器人原型已经展示了在地球重力环境下在平坦的煤渣砌块墙壁和不平坦的岩石表面上的垂直攀爬。
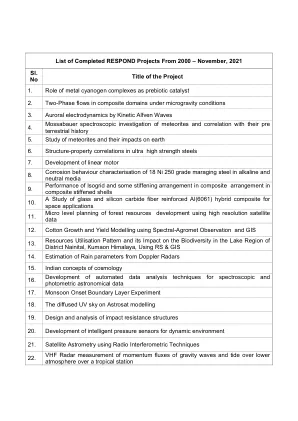
自 2000 年以来已完成的 RESPOND 项目列表
调查斯里赫里科塔岛的一些生态方面:(1)植物与动物的关系,特别关注鸟类和哺乳动物的食物植物(2)懒猴(Loris Tardigradus)的生态学,特别关注植被类型


“ MHC-I- OPATHY”的Eular研究小组:识别疾病 转运蛋白介导的药物输送 细胞系和患者衍生的异种移植物的表面分析证实了FGFR4,NCAM1,CD276和突出显示AGRL2,JAM3和L1CAM,作为横纹肌肉瘤的表面目标 微生物 机器学习根据MRI纹理分析预测犬胶质瘤的组织学类型和等级 在类似手术的环境中,用于脑组织分化和白质纤维道鉴定的宽场成像摩尔器极化法的鲁棒性:离体研究 再生响应元件Careg监测MULLER GLIA在MNU诱导的斑马鱼视网膜损伤后的激活 介导对淡水的适应性
Jonas JW Kuiper , Shumnalieva,10个秘密,11inakötter, 19,20名忠实居民,21,22NatašaVidovia,23,24和Talgal-Tutkun的折磨, 32FabianLötscher,33 Floor G Schance, 28,29 Ahmet Gul,40 John Bowes ,41,42 Rik Ju Loris ,19.20 MHC-I-Opathies研究

BRCA2种系突变鉴定胃癌对PARP抑制剂Annalisa Petrelli 1,Sabrina Rizzolio 1,Filippo Pietrantonio 2,Sa
BRCA2种系突变鉴定胃罐对PARP抑制剂的反应者Annalisa Petrelli 1,Sabrina rizzolio 1,Filippo Pietrantonio 2,Sara E. Bellomo 1.3,Matteo Benelli 4,Matteo Benelli 4,Loris de Cecco 5,Loris de Cecco 5,Dario Romagnoli 4,Enrico Berria Berria 1.6丹尼尔。 Moya-Rull 1, Cristina Migliore 1.3, Daniela Conticelli 1.3, Irene M. Maina 1.3, Elisabetta Puliga 1, Violeta Serra 7, Benedetta Pellegrino 8.9.10, Alba Llop-Guenvara 7, Antonino Musolino 8.9.10, Salvatore Siena 11.12, Andrea Sartore-Bianchi 11.12, Michele Prisciandaro 2.11,Federica Morano 2,Maria Antista 2,Uberto Fumagalli 13,Giovanni de Manzoni 14,Maurizio degiuli 15,Gian Luca Baiocchi 16,Marco F. Amisano 17
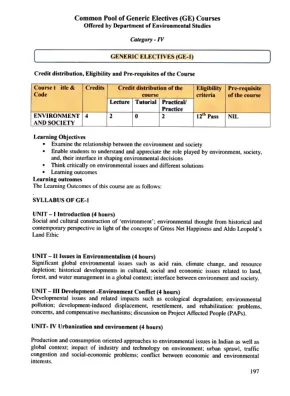
学习目标检查环境与社会之间的关系,使学生能够理解和欣赏Envir
1。分析您选择的国家/地区的环境的文化建构2。比较和对比具有不同环境质量水平的国家的环境感知3。批判性地评估了一个国家和不同国家内部的社会的发展状况和环境问题的类型。4。确定一个地区的社会人口统计学和工业特征,并将其与该地区的环境问题相关联?5。显示自然资源使用与不断变化的社区人口动态之间的任何关系7。评估人们的自然资源使用模式及其参与自然资源保护的可能性8。在给定的区域9.分析对人口或利益相关者环境资源的态度,知识和价值观,以及公众愿意为资源保护做出哪些权衡。10。确定跨社会成员的资源的访问,并建议采取公平共享资源或相关利益的措施。11。选择环境政策/法规,并确定其对社会的影响。暗示性读数1。Cárdenas,J.C.,2009。环境和开发实验。资源经济学年度评论,1(1),第157-82页。Chokkan,K.B.,Pandya,H。&Raghunathan,H。(eds)。 2004。 了解环境。 Sagar出版印度列兵。 Ltd.,新德里。 3。 Elliot,D。2003。 能源,社会和环境,可持续未来的技术。 30 Routledge出版社。 4。Loris,A.A.R。 ed。,2021。 环境与发展:挑战,政策和实践。 Springer自然。 5。 leopold,A。 1949。 土地道德。 pp。 201-214。 芝加哥。 美国。Chokkan,K.B.,Pandya,H。&Raghunathan,H。(eds)。2004。了解环境。Sagar出版印度列兵。 Ltd.,新德里。 3。 Elliot,D。2003。 能源,社会和环境,可持续未来的技术。 30 Routledge出版社。 4。Loris,A.A.R。 ed。,2021。 环境与发展:挑战,政策和实践。 Springer自然。 5。 leopold,A。 1949。 土地道德。 pp。 201-214。 芝加哥。 美国。Sagar出版印度列兵。Ltd.,新德里。3。Elliot,D。2003。能源,社会和环境,可持续未来的技术。30 Routledge出版社。4。Loris,A.A.R。 ed。,2021。 环境与发展:挑战,政策和实践。 Springer自然。 5。 leopold,A。 1949。 土地道德。 pp。 201-214。 芝加哥。 美国。4。Loris,A.A.R。ed。,2021。环境与发展:挑战,政策和实践。Springer自然。5。leopold,A。1949。土地道德。pp。201-214。芝加哥。美国。美国。

四年本科课程(FYUGP)的教学大纲四年本科课程(FYUGP)的教学大纲
S.No. 主题 - 实验/实验室锅信用1p(30小时) 1个原子质:Balanoglossus,Herdmania,2 Agnatha:Petromyzon,粘液菌3鱼:Scoliodon,Torledopo,Heteropneustes,Labeo,Labeo,Exocoetus,Exocoetus,Exocoetus,Hampocampus,Anabas,Anabas。 4两栖动物:Necturus,Bufo,Hyla,Salamandra。 5爬行动物:Chelone,Varanus,Chamaeleon,Draco,Bungarus,Vipera,Naja,Crocodylus。 识别有毒和非毒蛇的关键。 6 Aves:研究不同命令的六只常见鸟类。 喙和爪的类型。 7哺乳动物:sorex,蝙蝠(食虫性和节俭),funambulus,loris,herpestes,erinaceous。 韦伯利亚小骨的坐骑,来自家禽的螺旋。S.No.主题 - 实验/实验室锅信用1p(30小时)1个原子质:Balanoglossus,Herdmania,2 Agnatha:Petromyzon,粘液菌3鱼:Scoliodon,Torledopo,Heteropneustes,Labeo,Labeo,Exocoetus,Exocoetus,Exocoetus,Hampocampus,Anabas,Anabas。4两栖动物:Necturus,Bufo,Hyla,Salamandra。5爬行动物:Chelone,Varanus,Chamaeleon,Draco,Bungarus,Vipera,Naja,Crocodylus。识别有毒和非毒蛇的关键。6 Aves:研究不同命令的六只常见鸟类。喙和爪的类型。7哺乳动物:sorex,蝙蝠(食虫性和节俭),funambulus,loris,herpestes,erinaceous。韦伯利亚小骨的坐骑,来自家禽的螺旋。

2024 年 CIRP 年鉴论文
A1 - 一种确定电动汽车电池绝对环境可持续性目标的分步方法。Abdur-Rahman Ali、Mauricio Schlösser Castillo、Felipe Cerdas、Christoph Herrmann (2) A2 - 包容性制造:人机交互学习对装配过程的贡献 Alessandro Simeone、Yuchen Fan、Dario Antonelli、Angioletta R. Catalano、Paolo C. Priarone (2)、Luca Settineri (1) A3 - 一种基于 LLM 的方法,用于实现装配中的无缝人机协作。Christos Gkournelos、Christos Konstantinou、Sotiris Makris (2) A4 - 由自主机器人驱动的基于视觉 AI 的人机协作装配。 Sichao Liu、Jianjing Zhang、Lihui Wang (1)、Robert X. Gao (1) A5 - 增强现实增强人机协作的手势交互模型 Sebastian Blankemeyer、David Wendorff、Annika Raatz / HK Toenshoff (1) A6 - 面向高级机器人认知的生成式人工智能和神经网络 Christoforos Aristeidou、Nikos Dimitropoulos、George Michalos (2) A7 - 精密优化工艺设计,用于使用铰接式工业机器人进行高度可重复的处理 Philip Gümbel、Klaus Dröder (2) A8 - 背部支撑外骨骼 3D 打印摆线执行器的动态特性和控制 Charbel Barsomian、Narayana Babu Paulsamy Eswaran、Mattia Pesenti、Marta Gandolla、Francesco Braghin、Emanuele Carpanzano (1)、Loris Roveda
加蓬经济动态
本期加蓬经济更新报告由世界银行团队编写,团队由 Erick Tjong(经济学家,EAWM2)和 Sonia Barbara Ondo Ndong(经济学家,EAWM2)共同领导,成员包括 Samer Naji Matta(高级经济学家,EAWM2)、Daniel Pajank(高级经济学家,EAWM1)、Mervy Every Viboudoulou Vilpoux(经济学家,EAWPV)、Ioana Alexandra Botea(社会保护经济学家,HAWS3)、Houda Karafli(青年专业人员,ISAE1)、Anna Bokina(运营官员,IAWE4)、Joana Monteiro da Mota(ET 顾问,EAWM2)和 Gildas Bopahbe Deudibe(顾问,EPVGE),由 Raju Singh(首席经济学家,EAWM2)监督。本报告受益于 Steve Loris Gui-Diby(EAEM2 高级经济学家)的见解和评论,而第 2 章则受益于 Chiara Bronchi(EGVPI 实践经理)、Chadi Bou Habib(EMFTX 首席经济学家)、Gaute Solheim(EMFTX 高级公共部门专家)、Dirk Heine(EMFTX 高级经济学家)、Paolo Agnolucci(DECPG 高级经济学家)以及世界银行能源部门管理援助计划(ESMAP)的支持和评论。

尤金·F·卡德威尔少将,•••,美国陆军。八月
· 1952 年 7 月至 1962 年 7 月。Thomas H. Harvey 上校,美国陆军总参谋部(炮兵)。1958 年 7 月至 1961 年 8 月。Harry W. O. Kinnard 准将,tW.I(当时为上校),美国陆军步兵。1961 年 2 月至 1962 年 6 月。M ar1J Loitise JJf. Rasmuson 上校,LSO,美国陆军女子军团。1952 年 9 月至 1962 年 7 月。Lon H. Smith 上校,NJ,美国陆军步兵。 3. 根据总统指示,依据 1942 年 7 月 20 日国会法案和 1955 年 3 月 15 日第 10600 号行政命令的规定,荣誉军团勋章(第二橡叶勋章群)授予以下人员,以表彰其在履行杰出服务中所表现出的异常功绩:朱利安 D. 阿贝尔上校,■■,美国陆军工程兵团。1950 年 6 月至 1962 年 7 月。洛里斯 R. 科克伦准将,1956 年 1 月至 1962 年 7 月。约翰 W. 基廷准将,■■,美国陆军。1956 年 6 月