机构名称:
¥ 1.0
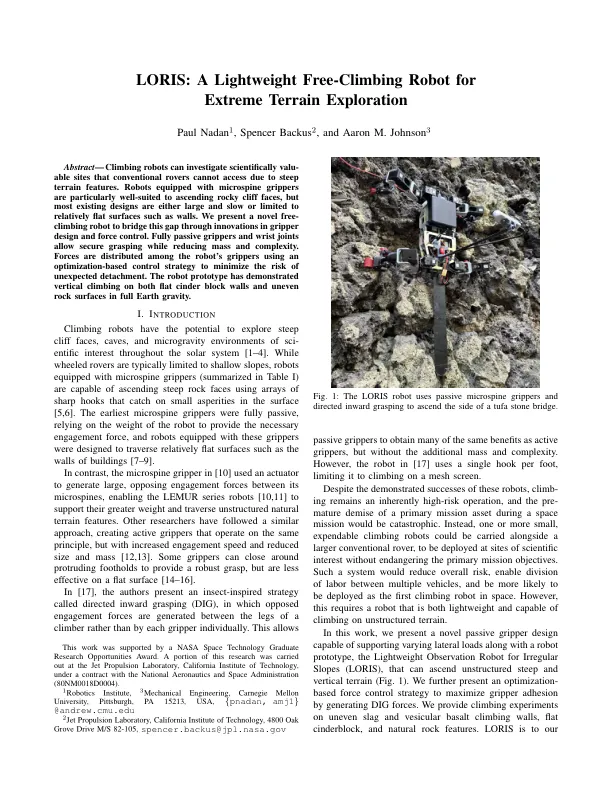
摘要 — 攀爬机器人可以调查传统探测车由于地形陡峭而无法到达的具有科学价值的地点。配备微棘爪的机器人特别适合攀爬岩石峭壁,但大多数现有设计要么体积大、速度慢,要么仅限于相对平坦的表面(如墙壁)。我们提出了一种新型自由攀爬机器人,通过创新爪设计和力控制来弥补这一差距。完全被动的爪和腕关节可实现安全抓握,同时减轻质量和复杂性。使用基于优化的控制策略在机器人的爪之间分配力,以最大限度地降低意外脱落的风险。机器人原型已经展示了在地球重力环境下在平坦的煤渣砌块墙壁和不平坦的岩石表面上的垂直攀爬。
LORIS:用于极端地形探索的轻型自由攀爬机器人
主要关键词



相关文件推荐