机构名称:
¥ 2.0
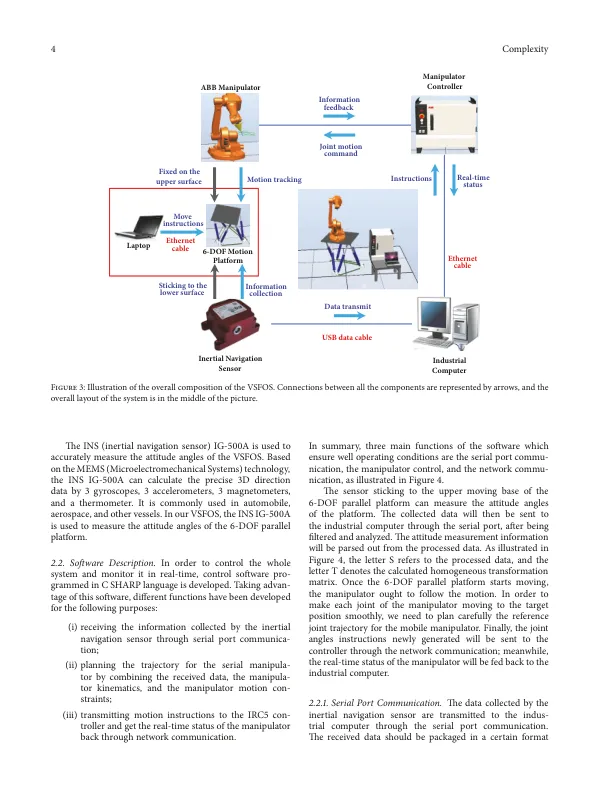
本文提出了一种基于并联和串联机器人平台的虚拟水下浮动操作系统 (VSFOS)。其开发的主要目的在于以更简单、更安全的方式进行模拟水下操作实验。该 VSFOS 由一个六自由度 (6-DOF) 并联平台、一个 ABB 串联机械手、一个惯性传感器和一个实时工业计算机组成。6-DOF 平台用于模拟水下航行器的运动,其姿态由惯性传感器测量。由实时工业计算机控制的 ABB 机械手作为操作工具执行水下操作任务。在控制系统架构中,开发了软件来接收惯性传感器收集的数据、进行通信和发送指令。此外,该软件还显示机械手的实时状态。为了验证所提出的系统,进行了两项实验来测试其性能。第一个实验主要测试VSFOS的通信功能,第二个实验主要测试机械臂跟随并联平台运动,在空间中执行模拟操作任务,两个实验的结果证明了VSFOS的有效性和性能。
用于机器人操作的虚拟水下浮动操作系统
主要关键词


相关文件推荐