机构名称:
¥ 2.0
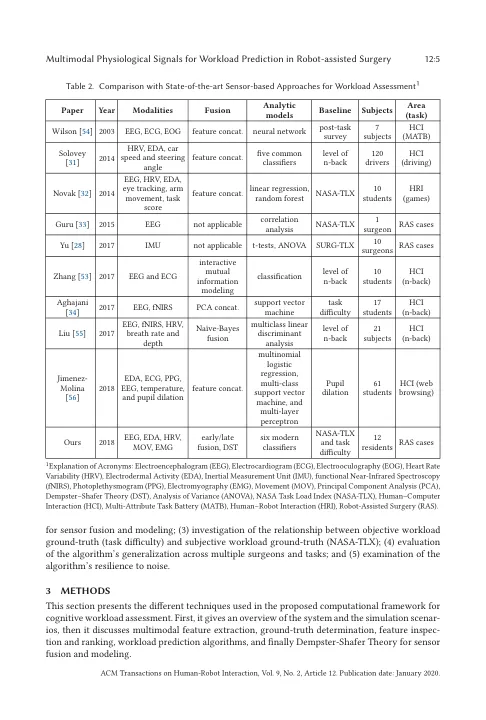
在机器人辅助手术期间监测外科医生的工作量可以指导任务需求的分配、调整系统界面和评估机器人系统的可用性。当前测量认知负荷的做法主要依赖于主观且会扰乱手术工作流程的问卷。为了解决这一限制,展示了一个计算框架来预测远程机器人手术期间的用户工作量。该框架利用无线传感器来监测外科医生的认知负荷并预测他们的认知状态。在经过验证的达芬奇技能模拟器上执行手术技能任务的十二名外科医生同时记录了多种生理模式(例如心率变异性、皮肤电和脑电图活动)的连续数据。这些手术任务的难度各不相同,例如,需要不同的视觉处理需求和精细运动控制程度。使用独立成分分析融合收集的多模态生理信号,并将预测结果与真实工作量水平进行比较。结果比较了不同分类器、传感器融合方案和生理模态(即使用单一模态与多种模态进行预测)的性能。结果发现,我们的多传感器方法优于单个信号,并且可以在基本和复杂的手术技能任务中 83.2% 的时间内正确预测认知工作量水平。
用于机器人辅助手术工作量预测的多模态生理信号
主要关键词




相关文件推荐