XiaoMi-AI文件搜索系统
World File Search SystemMatrice





信息通告 - 加拿大交通部
2) GRF 的核心原理是一个矩阵,它建立了跑道正常状态、机场用于传输跑道状态信息的代码、刹车报告和飞机性能技术指令之间的等价性。该跑道状况评估矩阵 (RCAM) 用于协调机场观测结果与机组人员对实际到达时间 (ATO) 的着陆性能的评估,与以前的方法和实践相比有了显著的改进。附录 C 中给出了 RCAM 的一个示例。
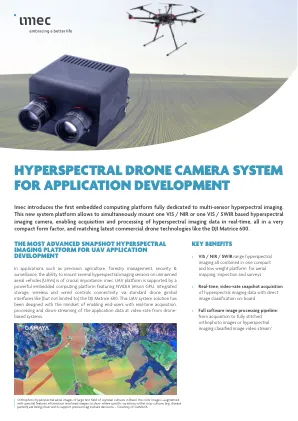
用于应用开发的高光谱无人机摄像系统
在精准农业、林业管理、安全和监控等应用中,在无人机 (UAV) 上安装多个高光谱成像传感器的能力至关重要。imec UAV 平台由强大的嵌入式计算平台支持,该平台具有 NVIDIA Jetson GPU、集成存储、通过标准无人机万向节接口(如(但不限于)DJI Matrice 600)实现无线和有线控制连接。该 UAV 系统解决方案的设计理念是使最终用户能够从基于无人机的系统实时获取、处理和以视频速率下载应用数据。

2025 年 1 月 23 日总部 D 页。 1 / 3 UNI CEI EN ISO/IEC 17025:...
如果出现符号 (1),则表示:材料/产品/基质不符合该方法但可接受。有关标题中指示的测试“类别”的定义,请参阅 ACCREDIA 通用规定 RG-02。

关于飞行活动中人为因素的文章
在飞行前,机长和机组人员必须意识到存在的危险以及每种危险的风险级别;风险矩阵鼓励对这些问题进行讨论,以期采取积极主动的方式确保飞行安全(根据以下原则:“在规划阶段最容易评估风险”和“应在适当的层面上做出风险接受决策”)。
关于飞行活动中人为因素的文章
在飞行前,机长和机组人员必须意识到存在的危险以及每种危险的风险级别;风险矩阵鼓励对这些问题进行讨论,以期采取积极主动的方式确保飞行安全(根据以下原则:“在规划阶段最容易评估风险”和“应在适当的层面上做出风险接受决策”)。
关于飞行活动中人为因素的文章
在飞行前,机长和机组人员必须意识到存在的危险以及与每种危险相关的风险级别;风险矩阵鼓励以积极主动的方式讨论这些问题以确保飞行安全(根据以下原则:“在规划阶段更容易评估风险”和“必须在适当的层面上做出风险接受决策”)。